STM32
简介
STM32是ST公司基于ARM Cortex-M内核开发的32位微控制器
STM32常应用在嵌入式领域,如智能车、无人机、机器人、无线通信、物联网、工业控制、娱乐电子产品等
STM32功能强大、性能优异、片上资源丰富、功耗低,是一款经典的嵌入式微控制器

点灯
采用PA0端口
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
while (1)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_0);
Delay_ms(500);
GPIO_SetBits(GPIOA, GPIO_Pin_0);
Delay_ms(500);
GPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_RESET);
Delay_ms(500);
GPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_SET);
Delay_ms(500);
GPIO_WriteBit(GPIOA, GPIO_Pin_0, (BitAction)0);
Delay_ms(500);
GPIO_WriteBit(GPIOA, GPIO_Pin_0, (BitAction)1);
Delay_ms(500);
}
}
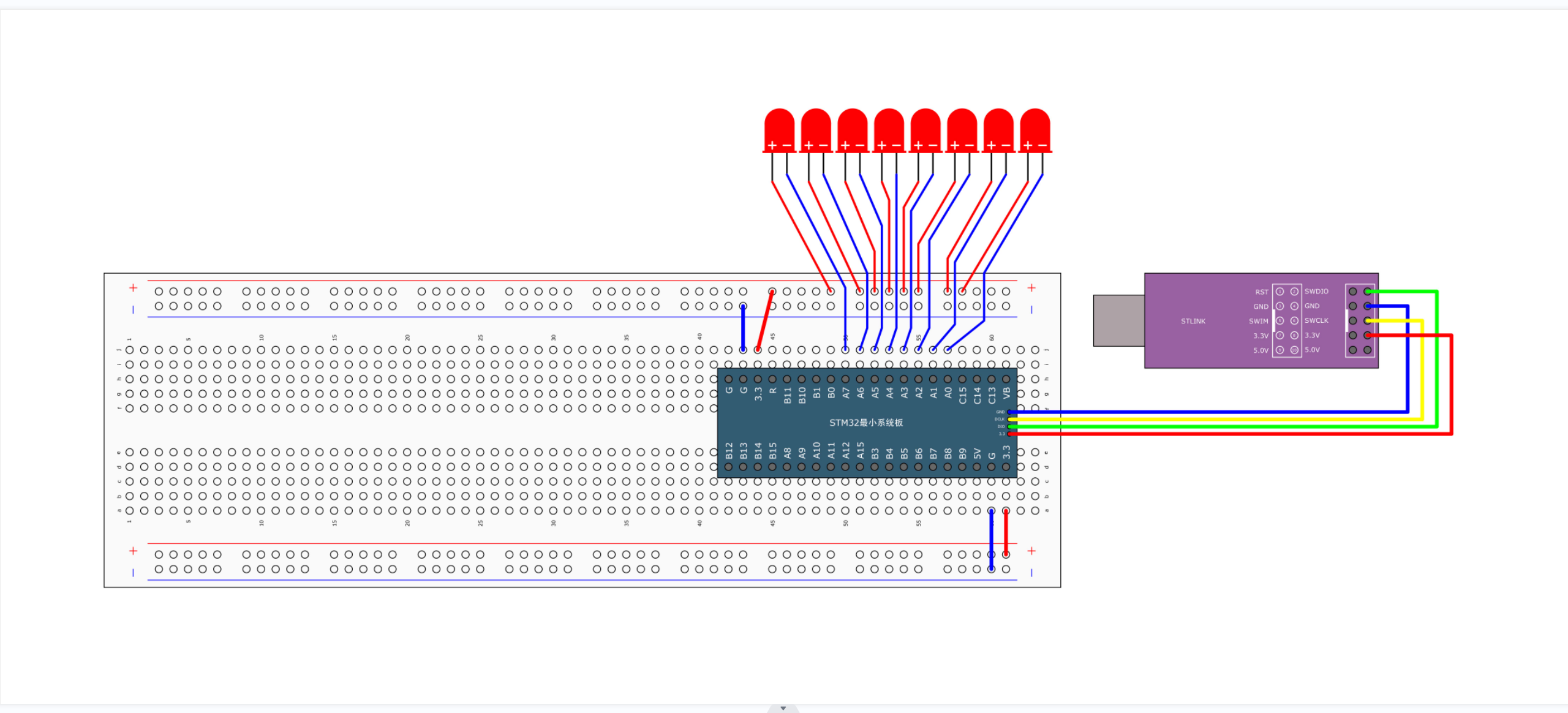
流水灯
PA端口 0-7
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
while (1)
{
GPIO_Write(GPIOA, ~0x0001); //0000 0000 0000 0001
Delay_ms(100);
GPIO_Write(GPIOA, ~0x0002); //0000 0000 0000 0010
Delay_ms(100);
GPIO_Write(GPIOA, ~0x0004); //0000 0000 0000 0100
Delay_ms(100);
GPIO_Write(GPIOA, ~0x0008); //0000 0000 0000 1000
Delay_ms(100);
GPIO_Write(GPIOA, ~0x0010); //0000 0000 0001 0000
Delay_ms(100);
GPIO_Write(GPIOA, ~0x0020); //0000 0000 0010 0000
Delay_ms(100);
GPIO_Write(GPIOA, ~0x0040); //0000 0000 0100 0000
Delay_ms(100);
GPIO_Write(GPIOA, ~0x0080); //0000 0000 1000 0000
Delay_ms(100);
}
}
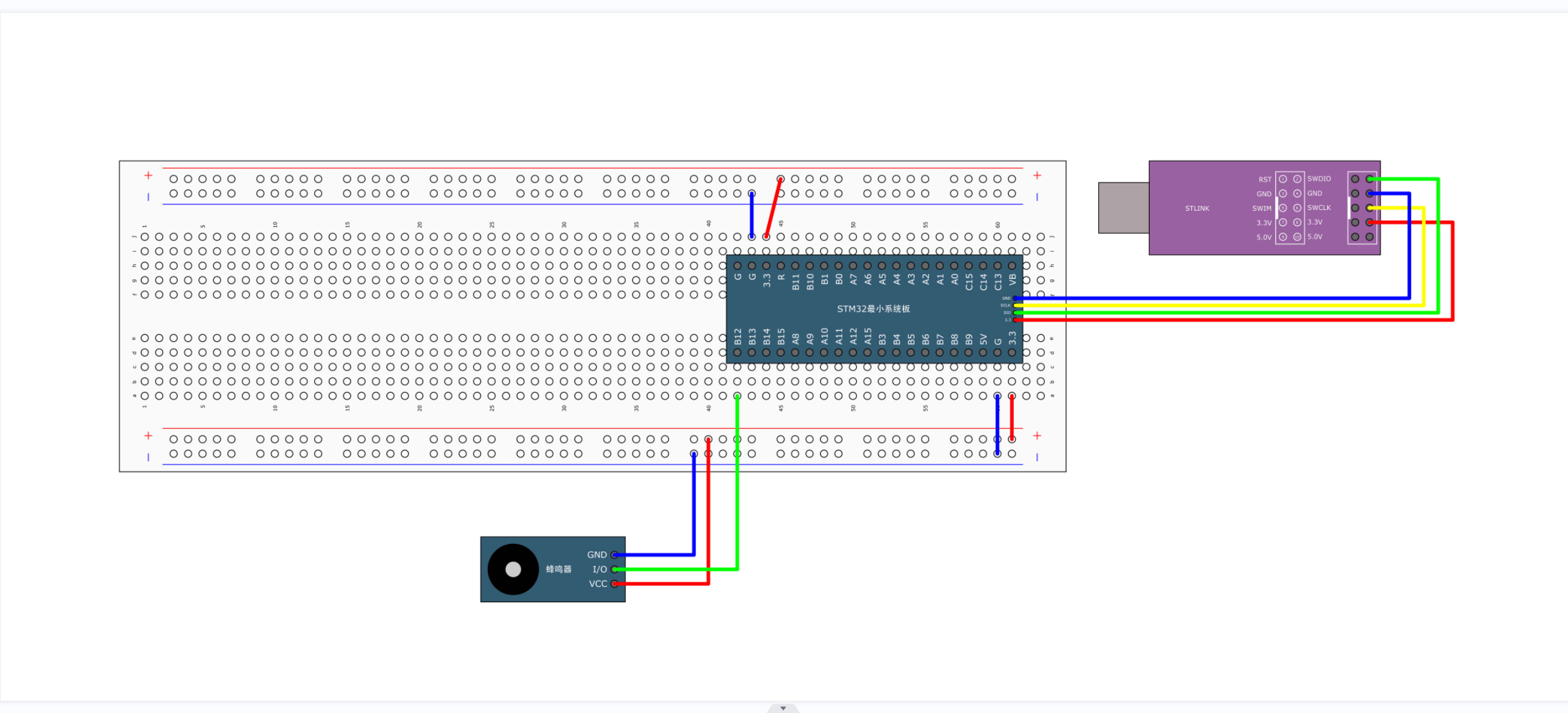
蜂鸣器
GPIO-B-12端口 低电平有效
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
while (1)
{
GPIO_ResetBits(GPIOB, GPIO_Pin_12);
Delay_ms(100);
GPIO_SetBits(GPIOB, GPIO_Pin_12);
Delay_ms(100);
GPIO_ResetBits(GPIOB, GPIO_Pin_12);
Delay_ms(100);
GPIO_SetBits(GPIOB, GPIO_Pin_12);
Delay_ms(700);
}
}
按键控制-LED
重要函数:
- uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); 【读取输入寄存器某一位】
- uint16_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx);【读取输入寄存器】
- uint8_t GPIO_ReadOutputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); 【读取输出寄存器某一位】
- uint16_t GPIO_ReadOutputData(GPIO_TypeDef* GPIOx);【读取输出寄存器】
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
#include "Key.h"
uint8_t KeyNum;
int main(void)
{
LED_Init();
Key_Init();
while (1)
{
KeyNum = Key_GetNum();
if (KeyNum == 1)
{
LED1_Turn();
}
if (KeyNum == 2)
{
LED2_Turn();
}
}
}
LED.c
#include "stm32f10x.h" // Device header
void LED_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_SetBits(GPIOA, GPIO_Pin_1 | GPIO_Pin_2);
}
void LED1_ON(void)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_1); // 低电平点亮
}
void LED1_OFF(void)
{
GPIO_SetBits(GPIOA, GPIO_Pin_1);
}
void LED1_Turn(void)
{
if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_1) == 0) //如果是亮的,就熄灭
{
GPIO_SetBits(GPIOA, GPIO_Pin_1);
}
else // 如果是熄灭的,就点亮
{
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
}
}
void LED2_ON(void)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_2);
}
void LED2_OFF(void)
{
GPIO_SetBits(GPIOA, GPIO_Pin_2);
}
void LED2_Turn(void)
{
if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_2) == 0) //如果是亮的,就熄灭
{
GPIO_SetBits(GPIOA, GPIO_Pin_2);
}
else // 如果是熄灭的,就点亮
{
GPIO_ResetBits(GPIOA, GPIO_Pin_2);
}
}
LED.h
#ifndef __LED_H
#define __LED_H
void LED_Init(void);
void LED1_ON(void);
void LED1_OFF(void);
void LED1_Turn(void);
void LED2_ON(void);
void LED2_OFF(void);
void LED2_Turn(void);
#endif
Key.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
void Key_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //默认高电平,有输入是0,无输入则是默认1
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
uint8_t Key_GetNum(void)
{
uint8_t KeyNum = 0;
// 按键检测
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0) //按键按下
{
Delay_ms(20); //消抖-按下
while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0); //检测松手
Delay_ms(20); //消抖-松手
KeyNum = 1;
}
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0)
{
Delay_ms(20);
while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0);
Delay_ms(20);
KeyNum = 2;
}
return KeyNum;
}
Key.h
#ifndef __KEY_H
#define __KEY_H
void Key_Init(void);
uint8_t Key_GetNum(void);
#endif
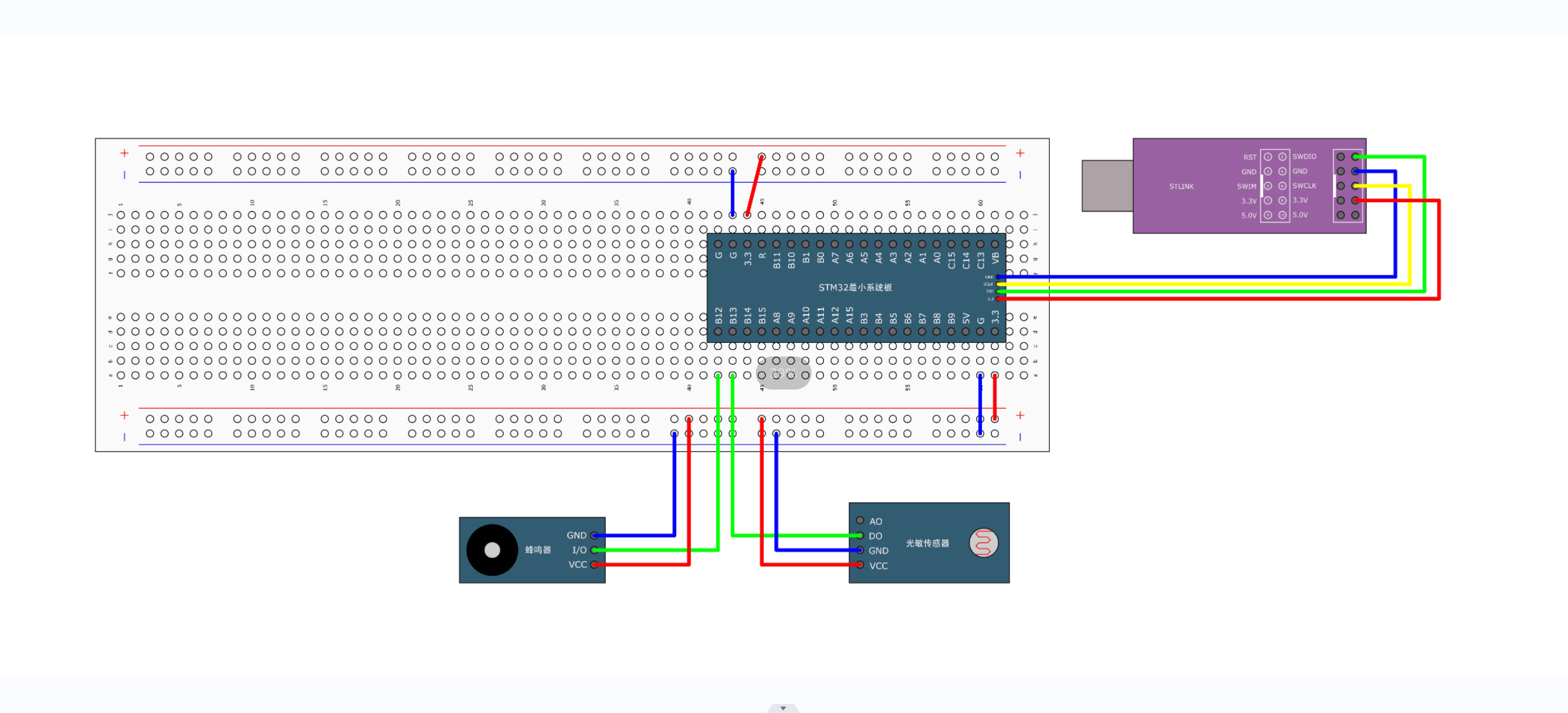
光敏传感器控制蜂鸣器
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Buzzer.h"
#include "LightSensor.h"
int main(void)
{
Buzzer_Init();
LightSensor_Init();
while (1)
{
if (LightSensor_Get() == 1) // 光线比较暗--遮住光敏传感器
{
Buzzer_ON(); //响
}
else // 光线比较亮--用手电筒照光明传感器
{
Buzzer_OFF();
}
}
}
Buzzer.c
#include "stm32f10x.h" // Device header
void Buzzer_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
// B-12
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB, GPIO_Pin_12);
}
void Buzzer_ON(void)
{
GPIO_ResetBits(GPIOB, GPIO_Pin_12); //低电平有效
}
void Buzzer_OFF(void)
{
GPIO_SetBits(GPIOB, GPIO_Pin_12);
}
void Buzzer_Turn(void)
{
if (GPIO_ReadOutputDataBit(GPIOB, GPIO_Pin_12) == 0) //如果是打开,就关闭
{
GPIO_SetBits(GPIOB, GPIO_Pin_12); //off
}
else
{
GPIO_ResetBits(GPIOB, GPIO_Pin_12); //on
}
}
Buzzer.h
#ifndef __BUZZER_H
#define __BUZZER_H
void Buzzer_Init(void);
void Buzzer_ON(void);
void Buzzer_OFF(void);
void Buzzer_Turn(void);
#endif
LightSensor.c
#include "stm32f10x.h" // Device header
void LightSensor_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
// B-13
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //默认高电平,有输入是0,无输入则是默认1
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
uint8_t LightSensor_Get(void)
{
return GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_13);
}
LightSensor.h
#ifndef __LIGHT_SENSOR_H
#define __LIGHT_SENSOR_H
void LightSensor_Init(void);
uint8_t LightSensor_Get(void);
#endif
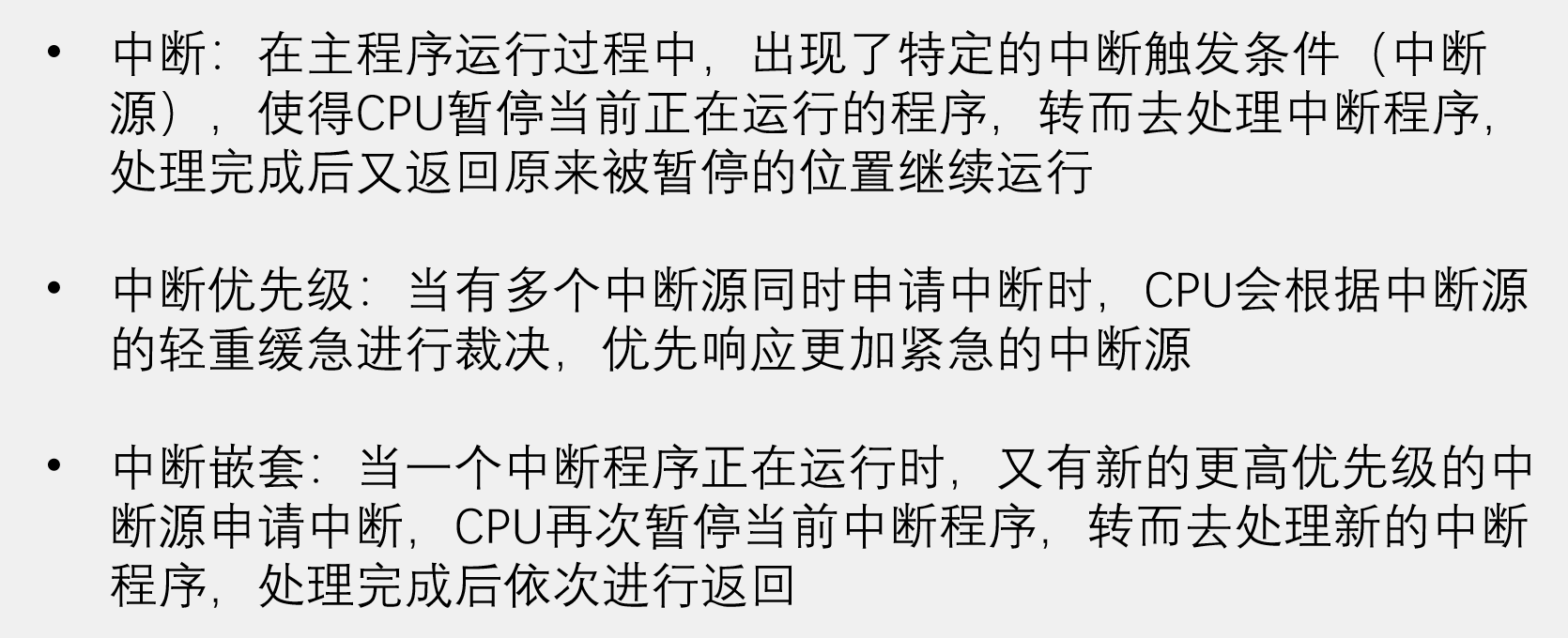
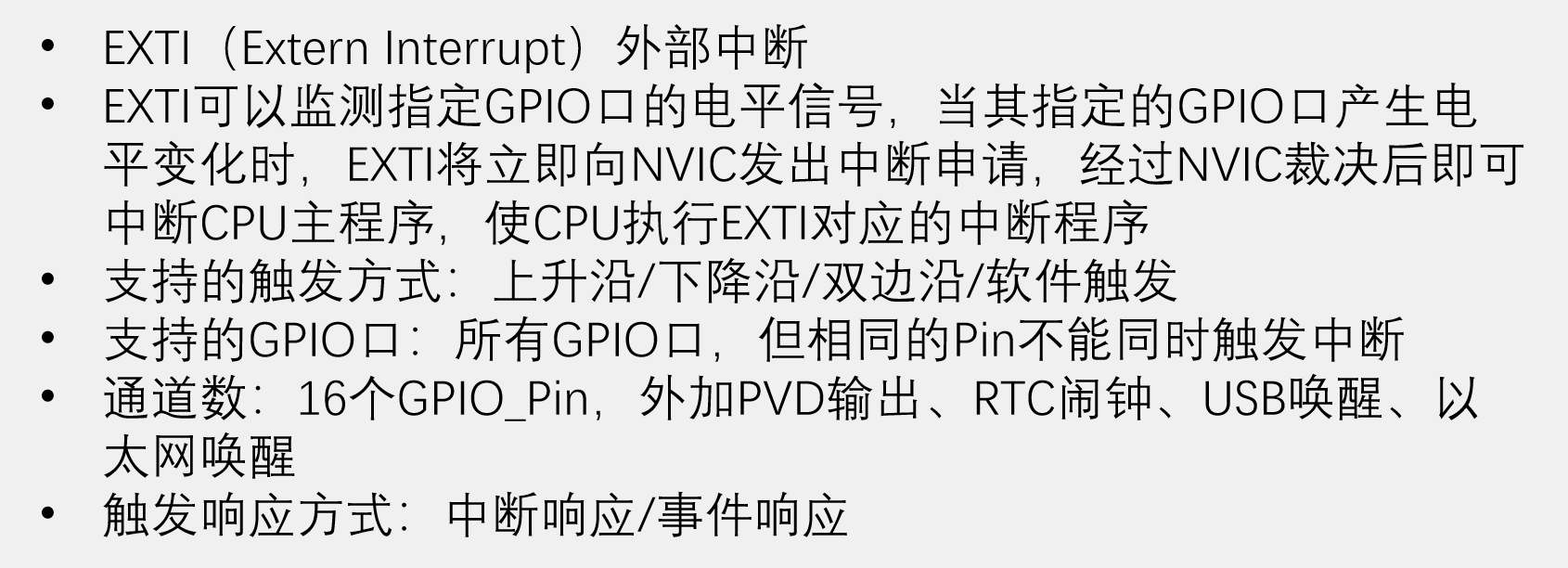
中断
中断就像“闹钟”,处理完“闹钟”接着“睡觉”。
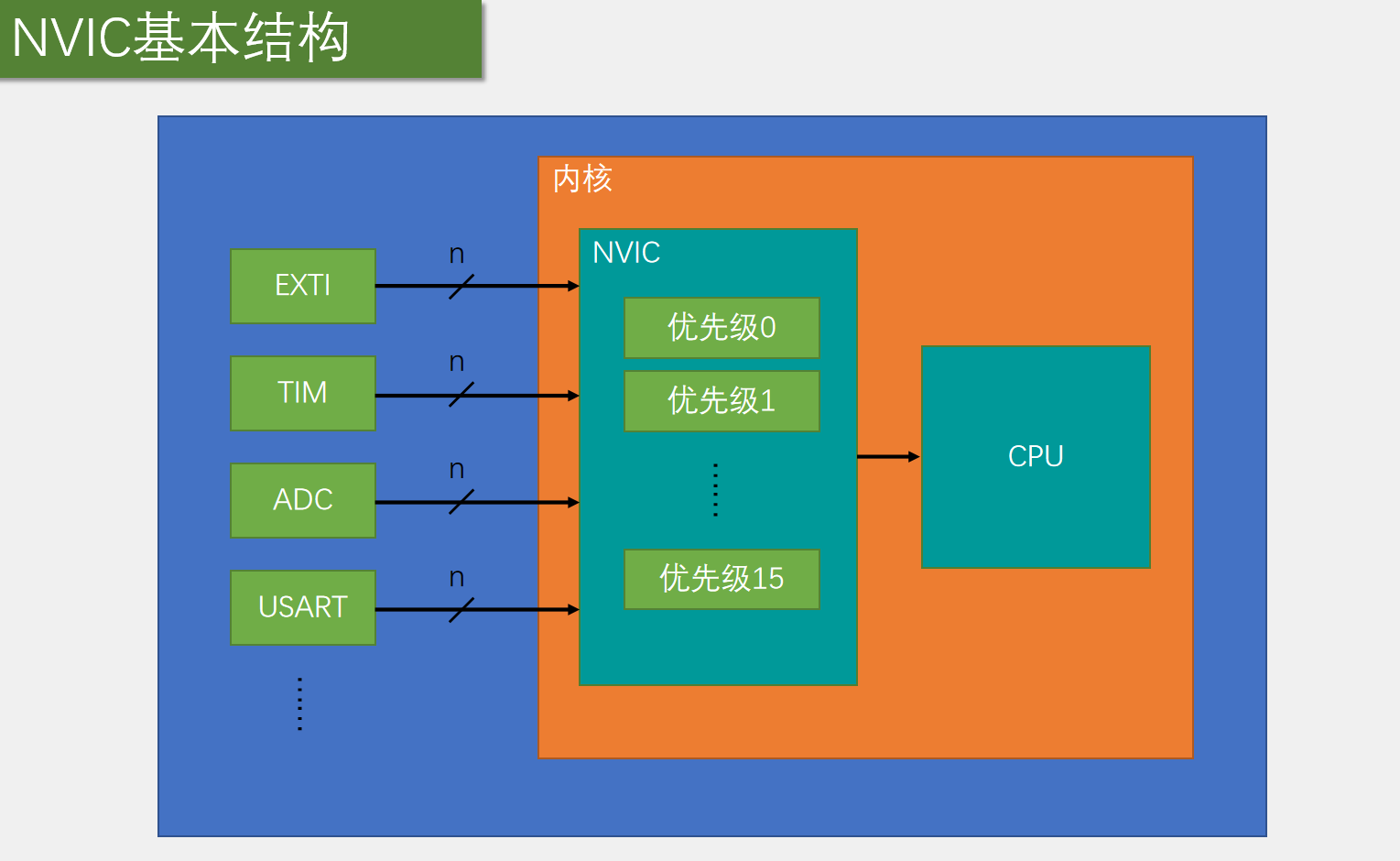
中断分类:
- EXIT
- TIM
- ADC
- I2C
- SPI
- USART
- CAN
NVIC:嵌套中断向量控制器【统一分配中断优先级和管理中断的】
可以理解为医院的叫号系统,根据优先级来。
- 正常排队
- 紧急病人插队:响应优先级 【插队优先级】
- 更加紧急的病人插队 :嵌套中断【抢占优先级】
即:抢占优先级高的可以中断嵌套,响应优先级高的可以优先排队,抢占优先级和响应优先级均相同的按中断号排队

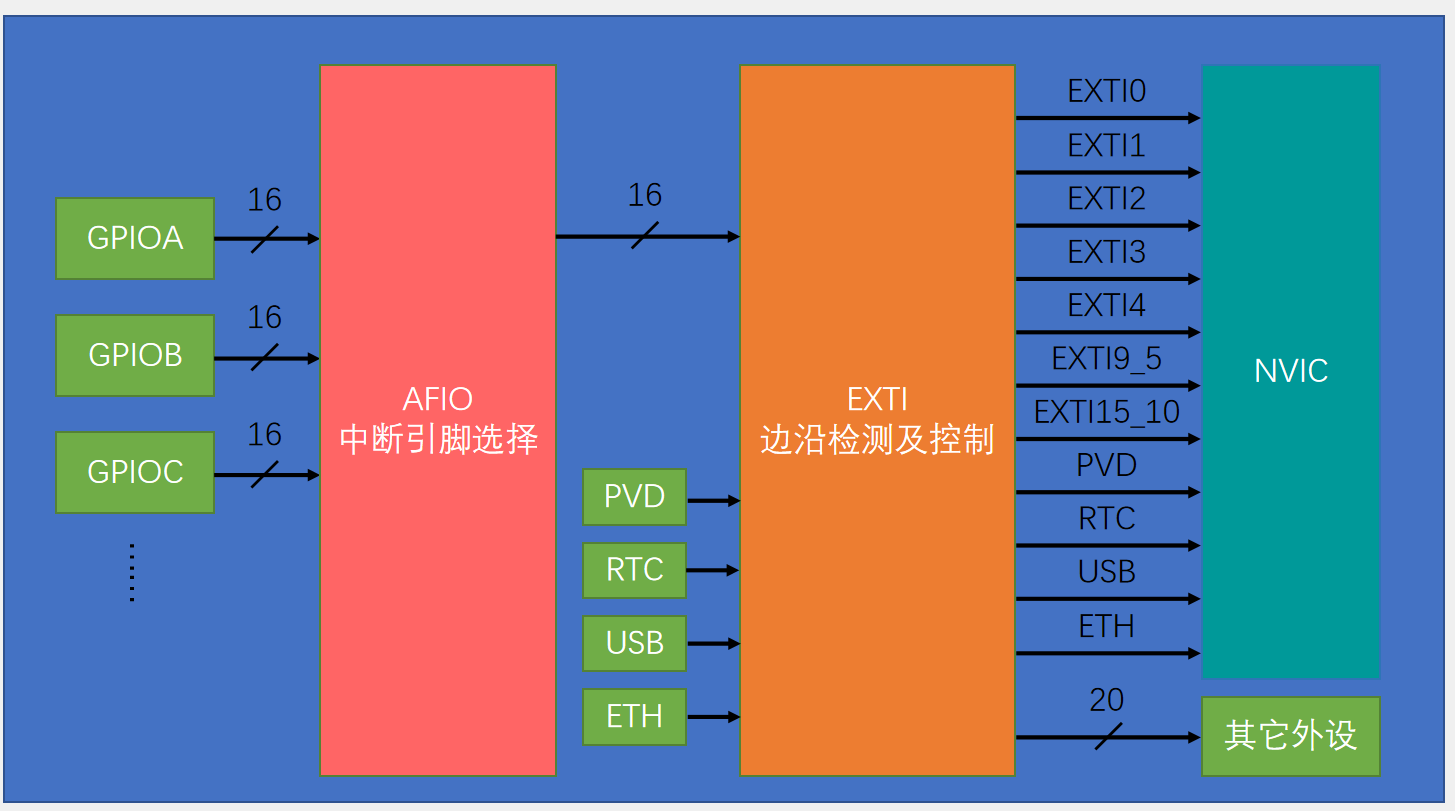
EXIT 概念
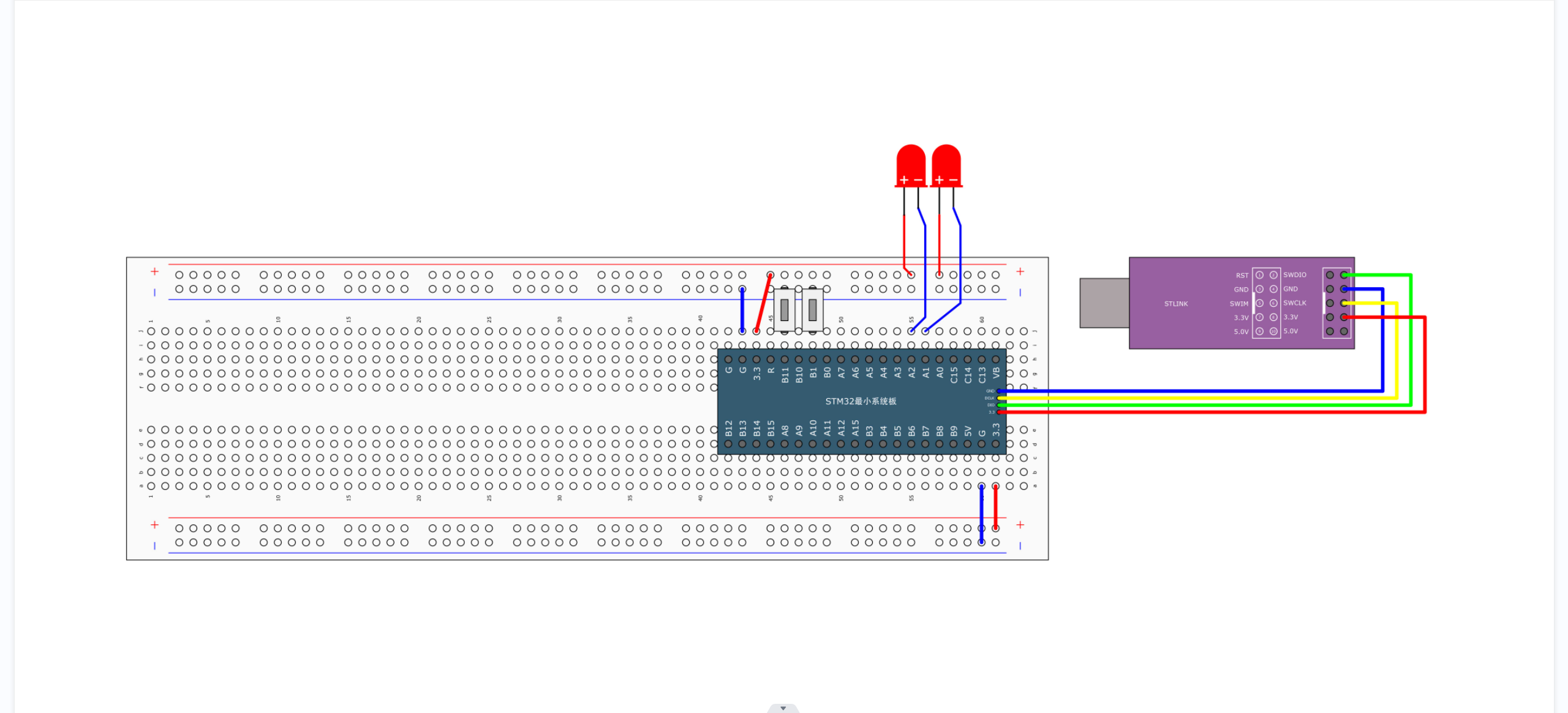
EXIT 实例
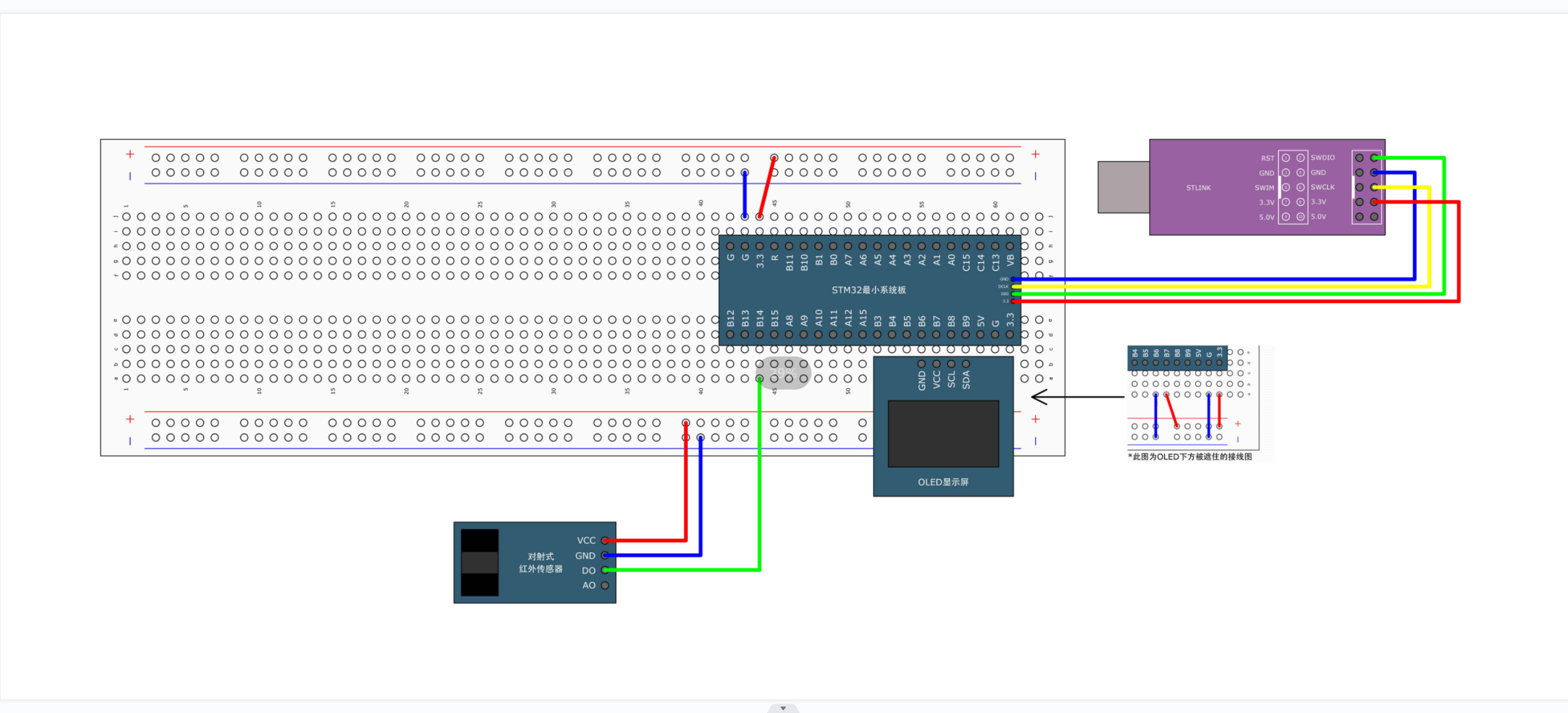
对射式红外传感器计次
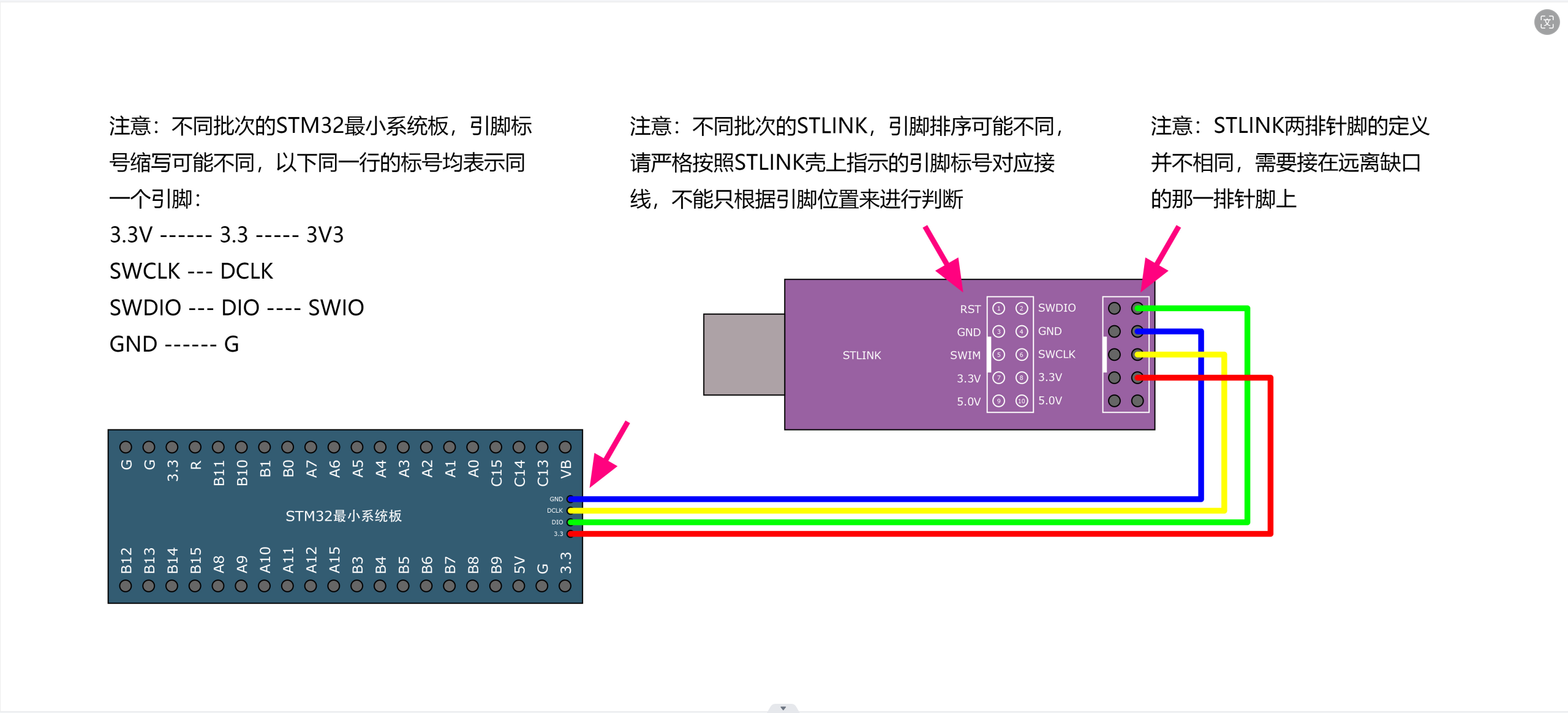
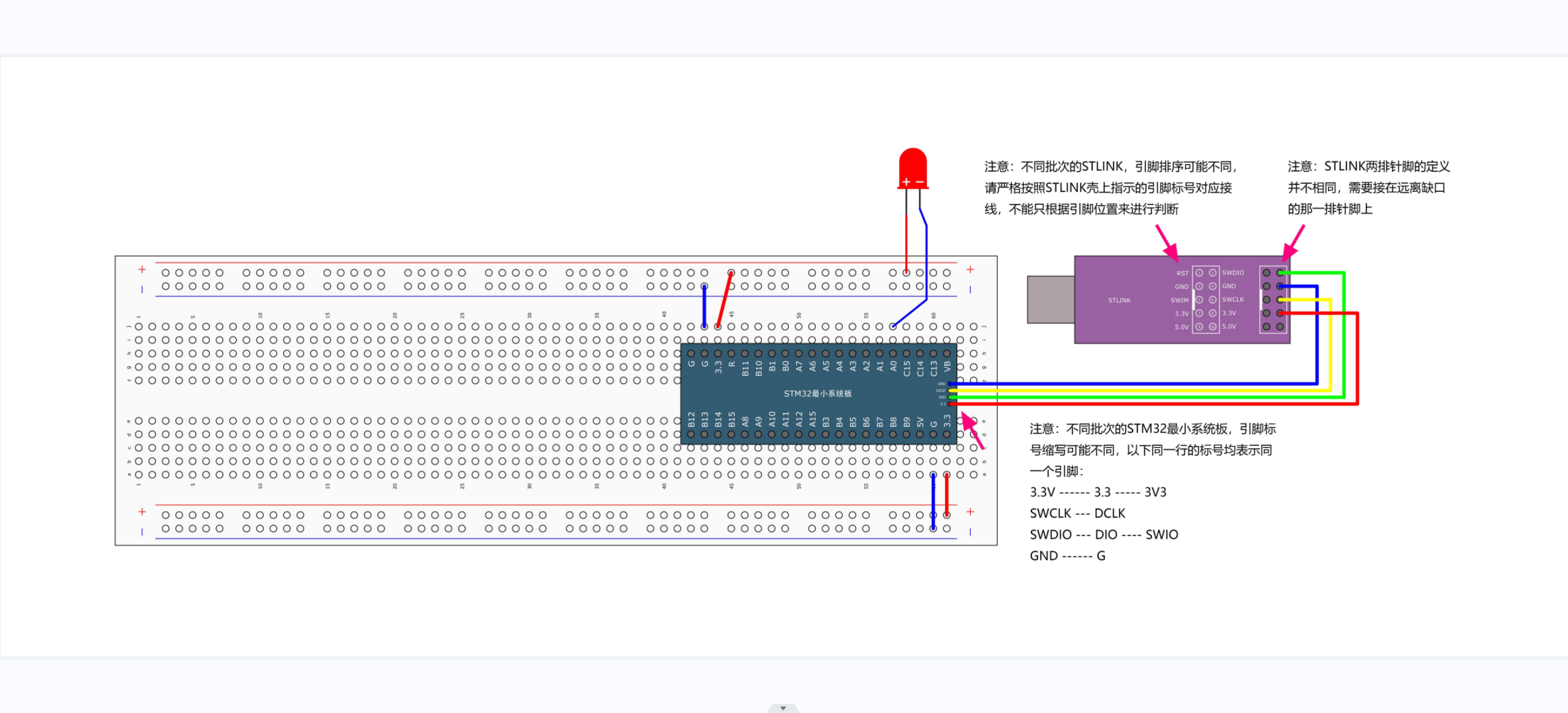
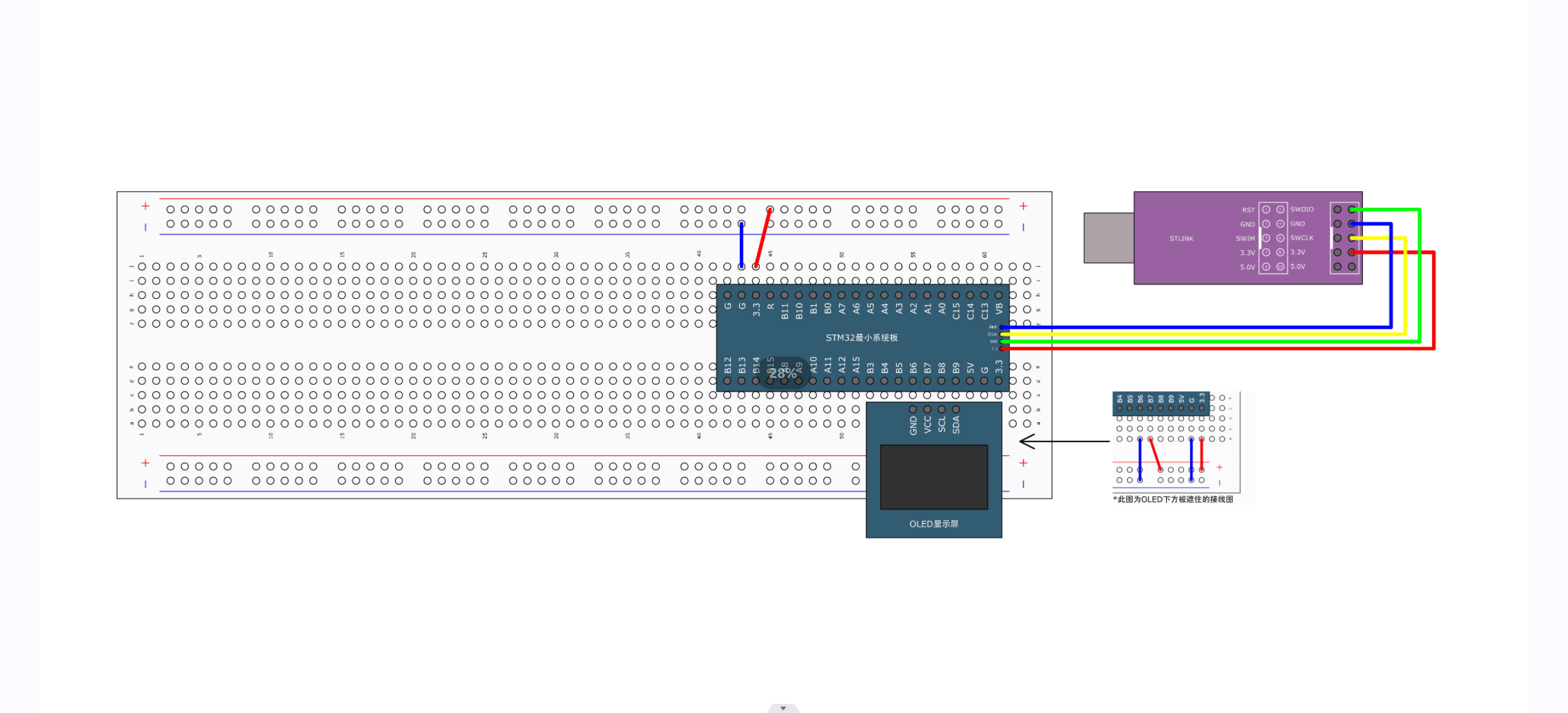
OLED调式工具接线图:
中断初始化理解:
//GPIO -> AFIO -> EXIT -> NVIC -> CPU
void CountSensor_Init(void)
{
// 1 配置时钟 GPIOB AFIO [RCC_APB2...函数 要和RCC_APB2...参数 对应起来]
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
// NVIC 是内核外设,内核外设不需要开启时钟
// 2 配置GPIO,输入模式
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉输入,默认为高电平输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14; // DO 接STM32 PB14
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//3 配置AFIO[中断引脚选择],选择使用的GPIO: DO 接STM32 PB14 -> EXIT14
// 调用此函数以配置AFIO的数据选择器,选择自定义的中断引脚
// 它实际上是AFIO的函数,放置在GPIO里
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource14);
//4 配置EXIT,选择边沿触发方式
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line14; //PB14的14线路
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //中断响应
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //下降沿触发
EXTI_Init(&EXTI_InitStructure);
//5 NVIC 设置优先级
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
// 初始化
NVIC_InitTypeDef NVIC_InitStructure;
// 中断通断 10-15
NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
}
注意:
初始化:
void EXTI_DeInit(void); void EXTI_Init(EXTI_InitTypeDef* EXTI_InitStruct); void EXTI_StructInit(EXTI_InitTypeDef* EXTI_InitStruct);软件触发中断函数: void EXTI_GenerateSWInterrupt(uint32_t EXTI_Line);
主程序使用:
FlagStatus EXTI_GetFlagStatus(uint32_t EXTI_Line); void EXTI_ClearFlag(uint32_t EXTI_Line);中断程序使用:
ITStatus EXTI_GetITStatus(uint32_t EXTI_Line); void EXTI_ClearITPendingBit(uint32_t EXTI_Line);
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "CountSensor.h"
int main(void)
{
OLED_Init();
CountSensor_Init();
OLED_ShowString(1, 1, "Count:");
while (1)
{
OLED_ShowNum(1, 7, CountSensor_Get(), 5);
}
}
CountSensor.h
#ifndef __COUNT_SENSOR_H
#define __COUNT_SENSOR_H
void CountSensor_Init(void);
uint16_t CountSensor_Get(void);
#endif
CountSensor.c
#include "stm32f10x.h" // Device header
uint16_t CountSensor_Count;
//GPIO -> AFIO -> EXIT -> NVIC -> CPU
void CountSensor_Init(void)
{
// 1 配置时钟 GPIOB AFIO [RCC_APB2...函数 要和RCC_APB2...参数 对应起来]
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
// NVIC 是内核外设,内核外设不需要开启时钟
// 2 配置GPIO,输入模式
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉输入,默认为高电平输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14; // DO 接STM32 PB14
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//3 配置AFIO[中断引脚选择],选择使用的GPIO: DO 接STM32 PB14 -> EXIT
// 调用此函数以配置AFIO的数据选择器,选择自定义的中断引脚
// 它实际上是AFIO的函数,放置在GPIO里
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource14);
//4 配置EXIT,选择边沿触发方式
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line14; //PB14的14线路
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //中断响应
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //下降沿触发
EXTI_Init(&EXTI_InitStructure);
//5 NVIC 设置优先级 【两位抢占,两位响应】
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
// 初始化
NVIC_InitTypeDef NVIC_InitStructure;
// 中断通断 10-15
NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn; //指定通断
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
// NVIC_PriorityGroup_2:都是0-3
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //只有一个就设置成1 【抢占优先级】
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //只有一个就设置成1 【响应优先级】
NVIC_Init(&NVIC_InitStructure);
}
uint16_t CountSensor_Get(void)
{
return CountSensor_Count;
}
// 中断函数,名称固定【中断函数-不需要调用,自动执行】
void EXTI15_10_IRQHandler(void) //EXTI_Line10-15都可以进来
{
if (EXTI_GetITStatus(EXTI_Line14) == SET) //查看中断标志是否为1
{
/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_14) == 0)
{
CountSensor_Count ++; //触发一次就++
}
EXTI_ClearITPendingBit(EXTI_Line14); //清除中断标志位
}
}
旋转编码器
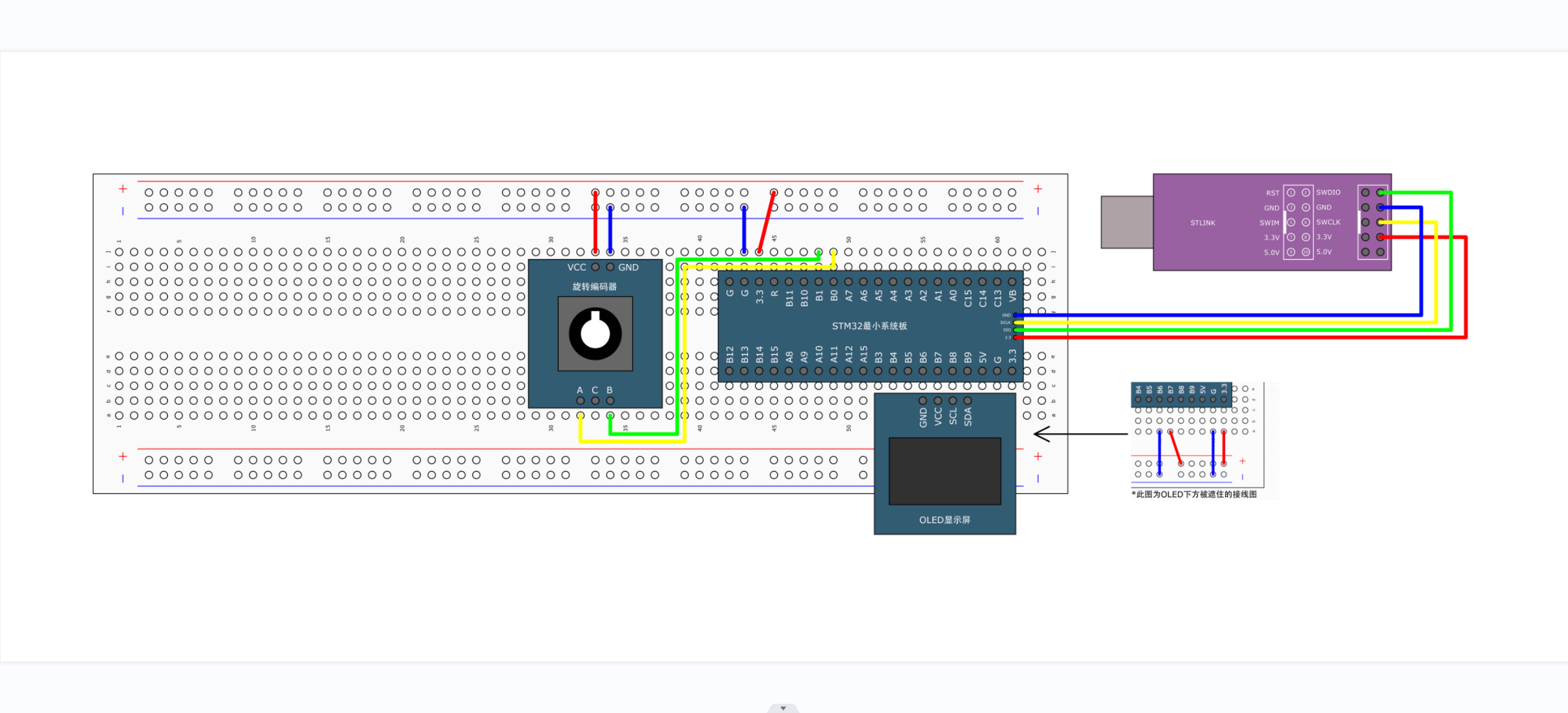
正向【顺时针】旋转,数字增加,反之减少。
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Encoder.h"
int16_t Num;
int main(void)
{
OLED_Init();
Encoder_Init();
OLED_ShowString(1, 1, "Num:");
while (1)
{
Num += Encoder_Get();
OLED_ShowSignedNum(1, 5, Num, 5);
}
}
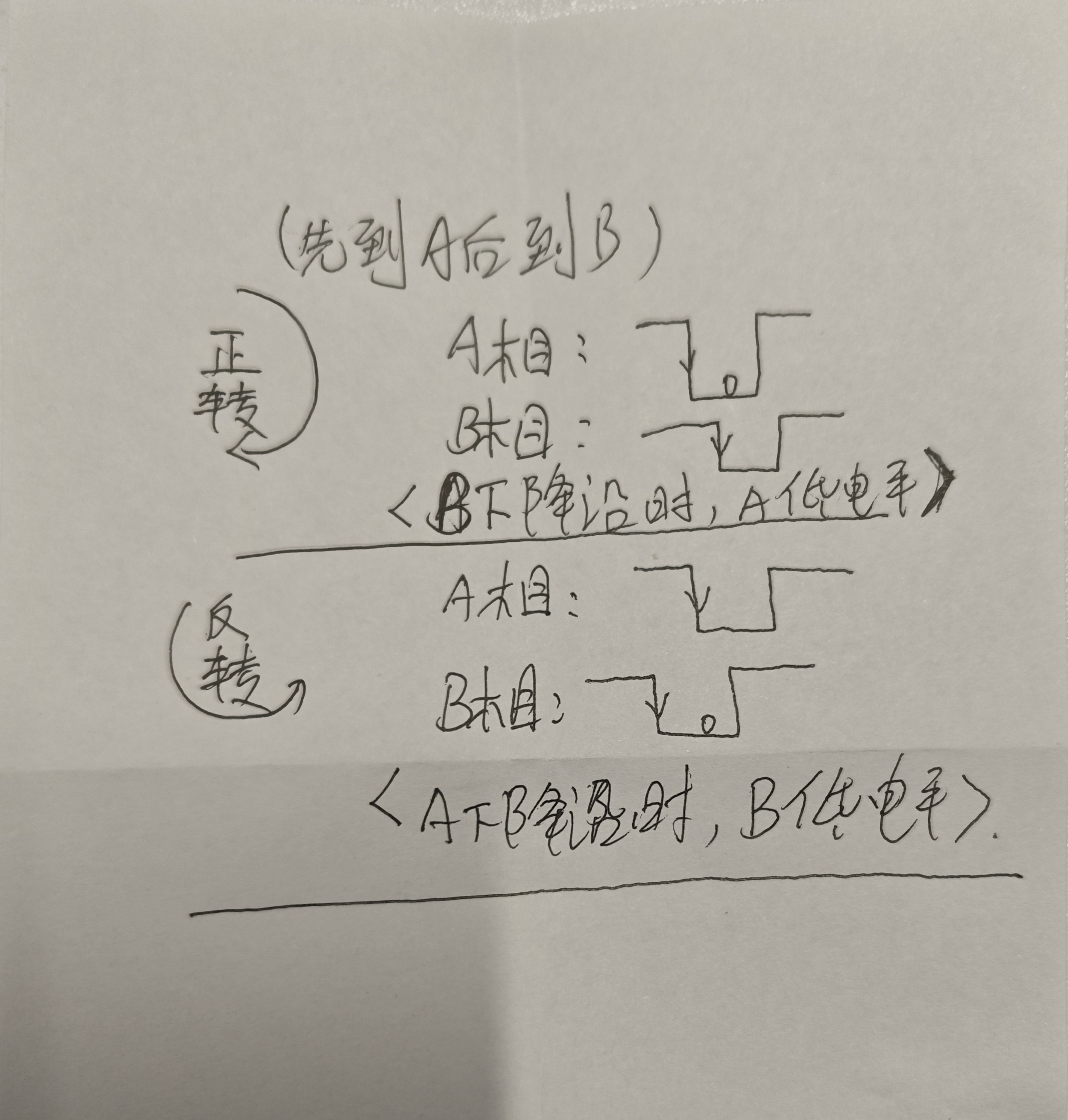
如何判断旋转方向:
- 正向:B下降沿时,A低电平 –> 当B是低电平时【刚刚变化】,A已经是低电平了。
- 反转:A下降沿时,B低电平 –> 当A是低电平时【刚刚变化】,B已经是低电平了。
Encoder.h
#ifndef __ENCODER_H
#define __ENCODER_H
void Encoder_Init(void);
int16_t Encoder_Get(void);
#endif
Encoder.c
#include "stm32f10x.h" // Device header
int16_t Encoder_Count;
void Encoder_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// PB0 PB1
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource1);
// 下降沿触发
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line1; // PB0 PB1
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_Init(&EXTI_InitStructure);
// 中断分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//中断0
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; //中断0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //响应优先级
NVIC_Init(&NVIC_InitStructure);
//中断1
NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn; //中断1
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //响应优先级
NVIC_Init(&NVIC_InitStructure);
}
int16_t Encoder_Get(void)
{
int16_t Temp;
Temp = Encoder_Count; //返回Count用于外部加减,返回后进行清零
Encoder_Count = 0;
return Temp;
}
//中断0 1 分别是两个函数;而9-5只用一个函数
void EXTI0_IRQHandler(void)
{
// 反向旋转【B0对应A,B1对应B.】
if (EXTI_GetITStatus(EXTI_Line0) == SET)
{
/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0)
{
//反转:A下降沿时,B低电平 --> 当A是低电平时【刚刚变化】,B已经是低电平了。
//向左转,数字减少
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0)
{
Encoder_Count --;
}
}
EXTI_ClearITPendingBit(EXTI_Line0);
}
}
//中断0 1 分别是两个函数;而9-5只用一个函数
void EXTI1_IRQHandler(void)
{
// 正向旋转 【B0对应A,B1对应B.】
if (EXTI_GetITStatus(EXTI_Line1) == SET)
{
/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0)
{
//正向:B下降沿时,A低电平 --> 当B是低电平时【刚刚变化】,A已经是低电平了。
//向右转,数字增加
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0)
{
Encoder_Count ++;
}
}
EXTI_ClearITPendingBit(EXTI_Line1);
}
}
注意:在中断里操作标志位,中断返回时对这个变量进行显示和操作。这样既能保证中断函数的简短快速,又能保证不产生冲突的硬件操作。
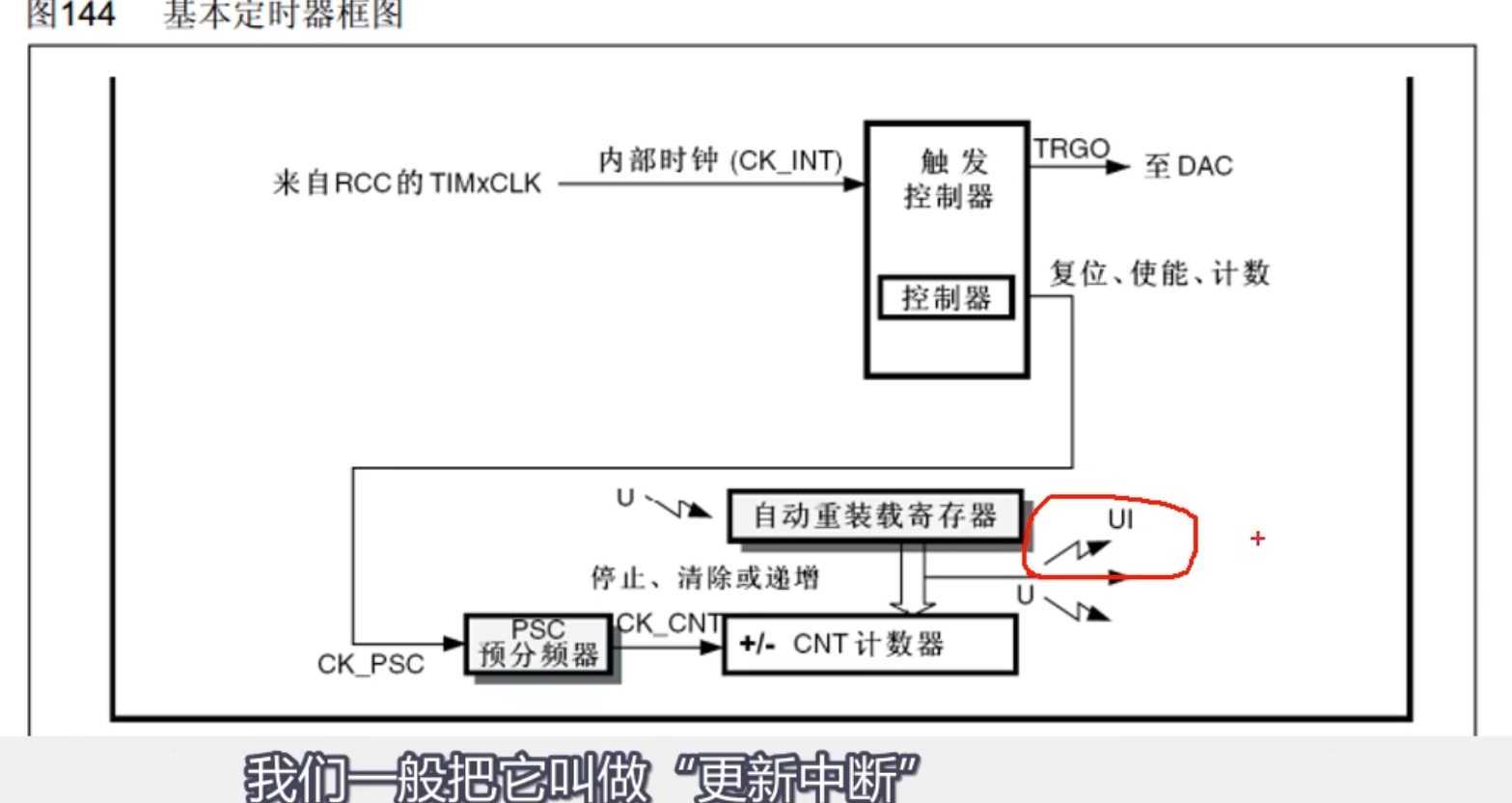
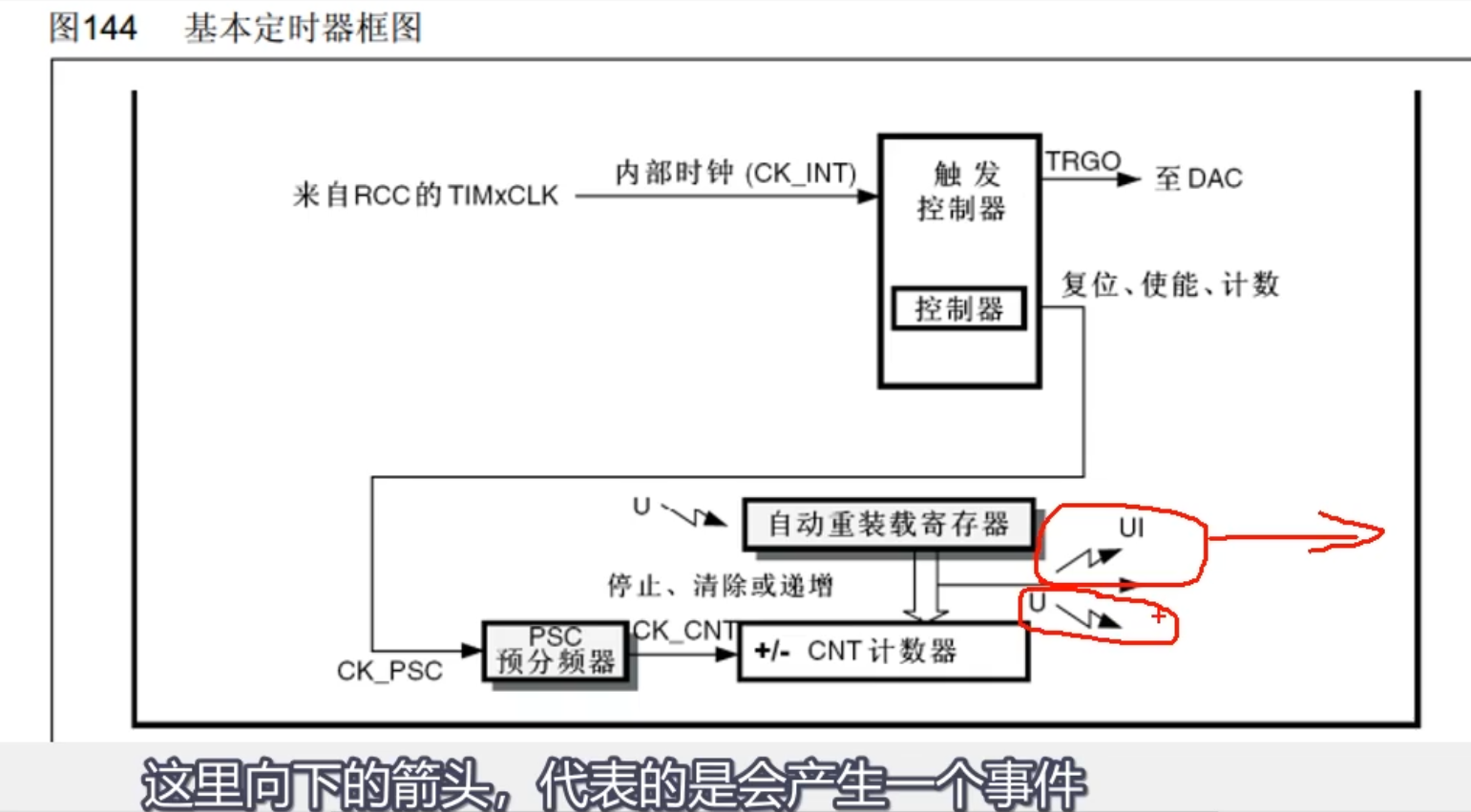
定时器
定时器:定时触发中断
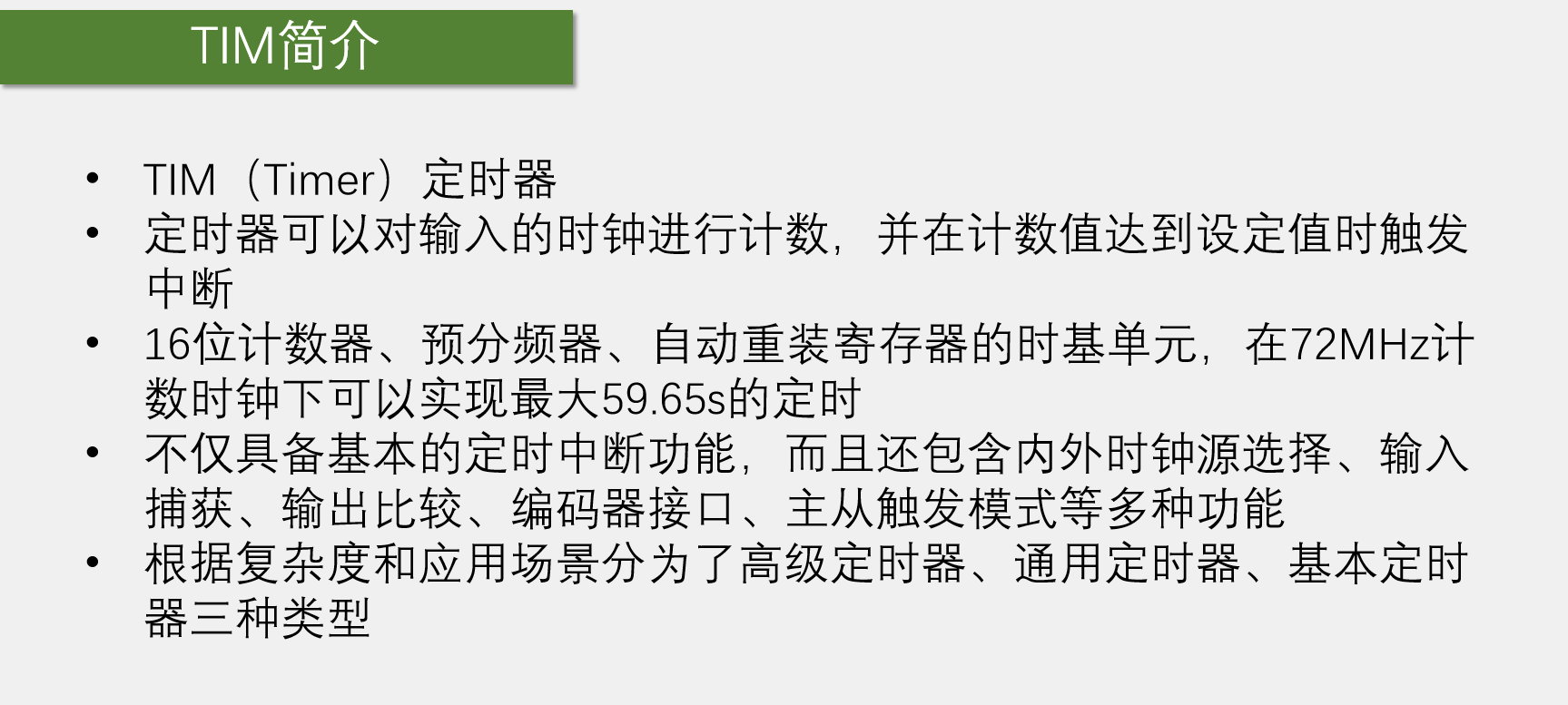
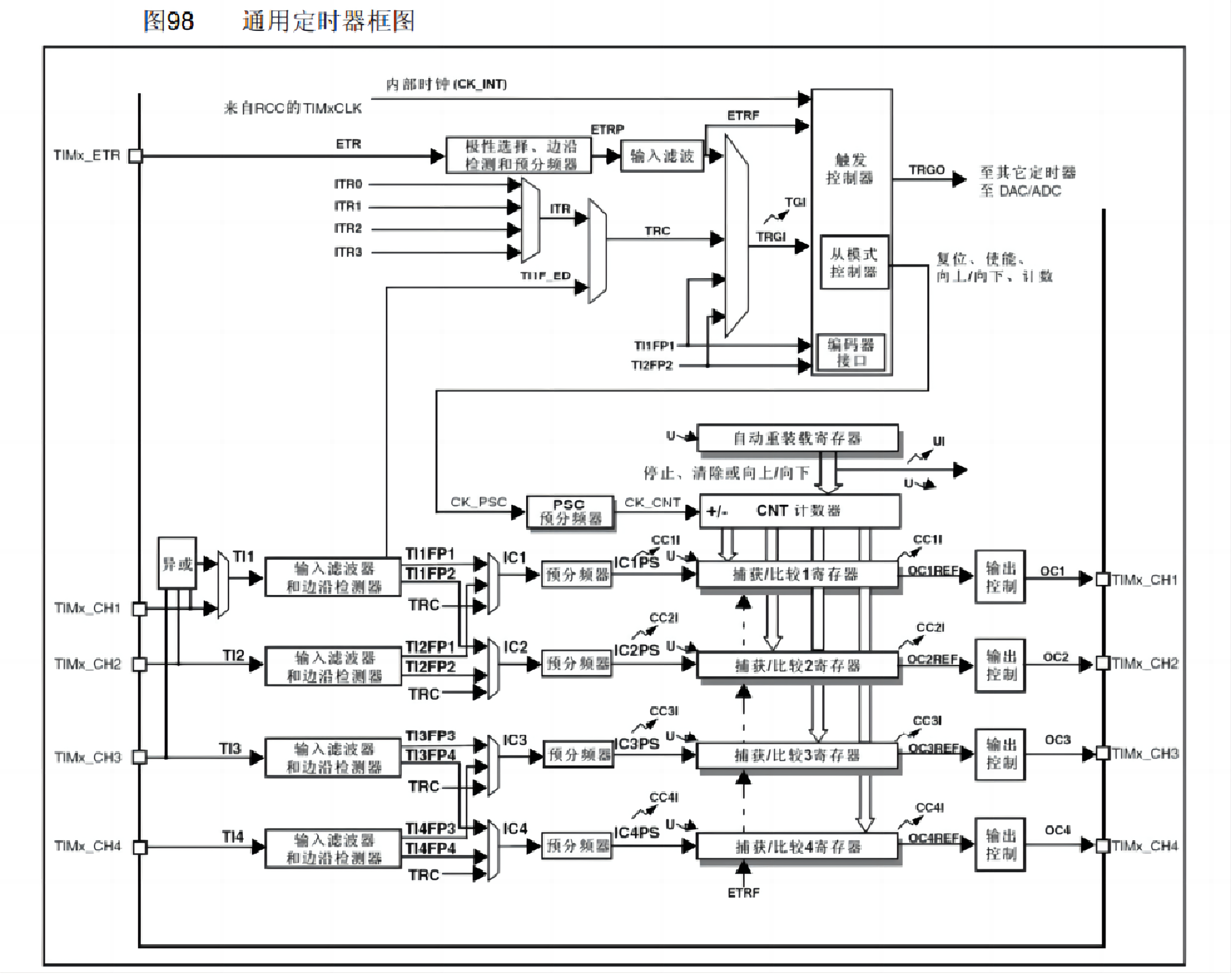
主要学习通用定时器: 【TIM2、TIM3、TIM4、TIM5】
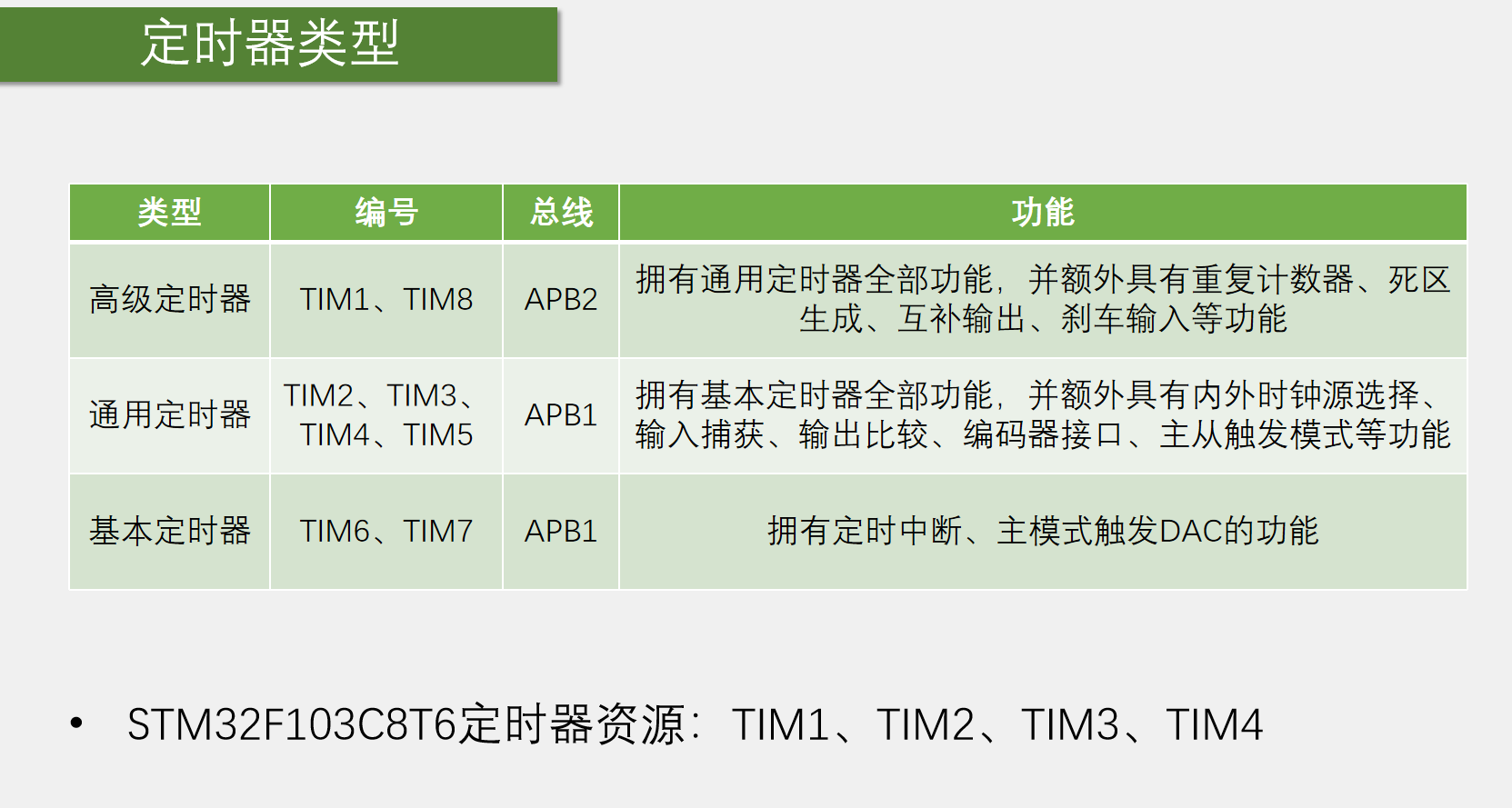
基本定时器:
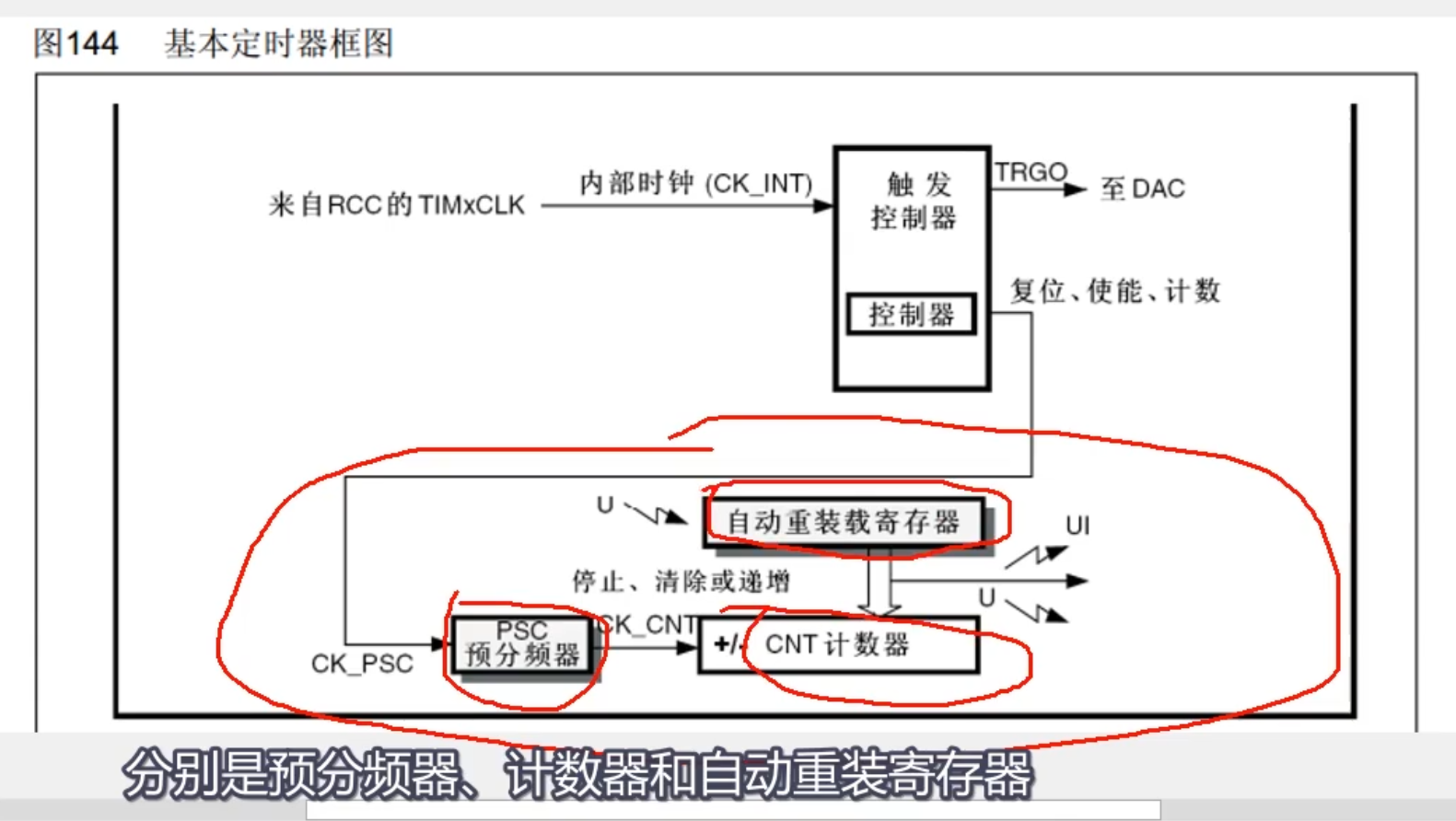
通用定时器:
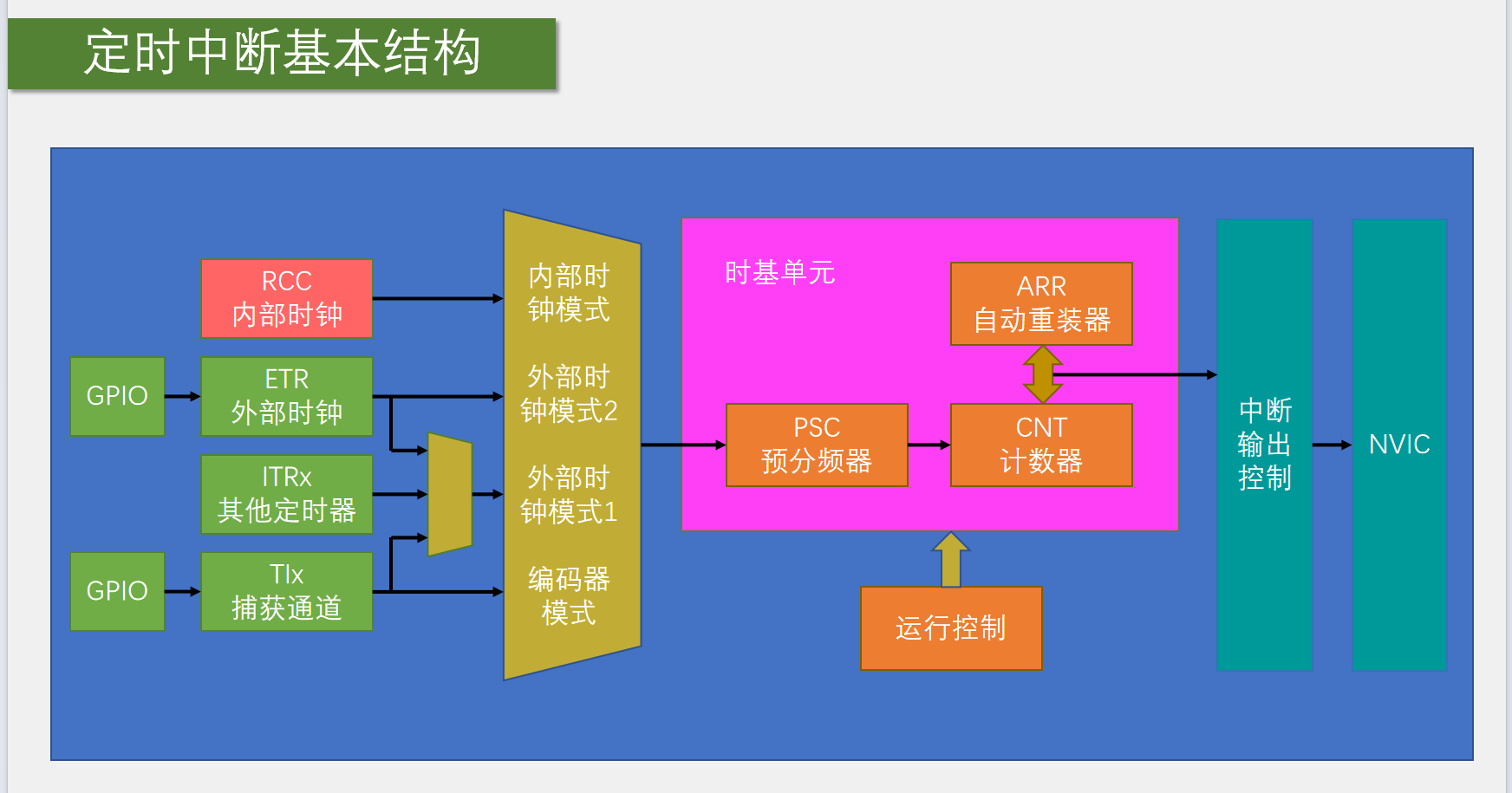
ARR: 自动重装寄存器
定时器-内部中断实现方式
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"
uint16_t Num;
int main(void)
{
OLED_Init();
Timer_Init();
OLED_ShowString(1, 1, "Num:");
while (1)
{
OLED_ShowNum(1, 5, Num, 5);
}
}
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
{
Num ++;
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
Timer.c
#include "stm32f10x.h" // Device header
void Timer_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_InternalClockConfig(TIM2);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1;
TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
// 手动清除更新中断标志位
TIM_ClearFlag(TIM2, TIM_FLAG_Update);//避免刚开始完就进中断
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM2, ENABLE);
}
/*
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
*/
Timer.h
#ifndef __TIMER_H
#define __TIMER_H
void Timer_Init(void);
#endif
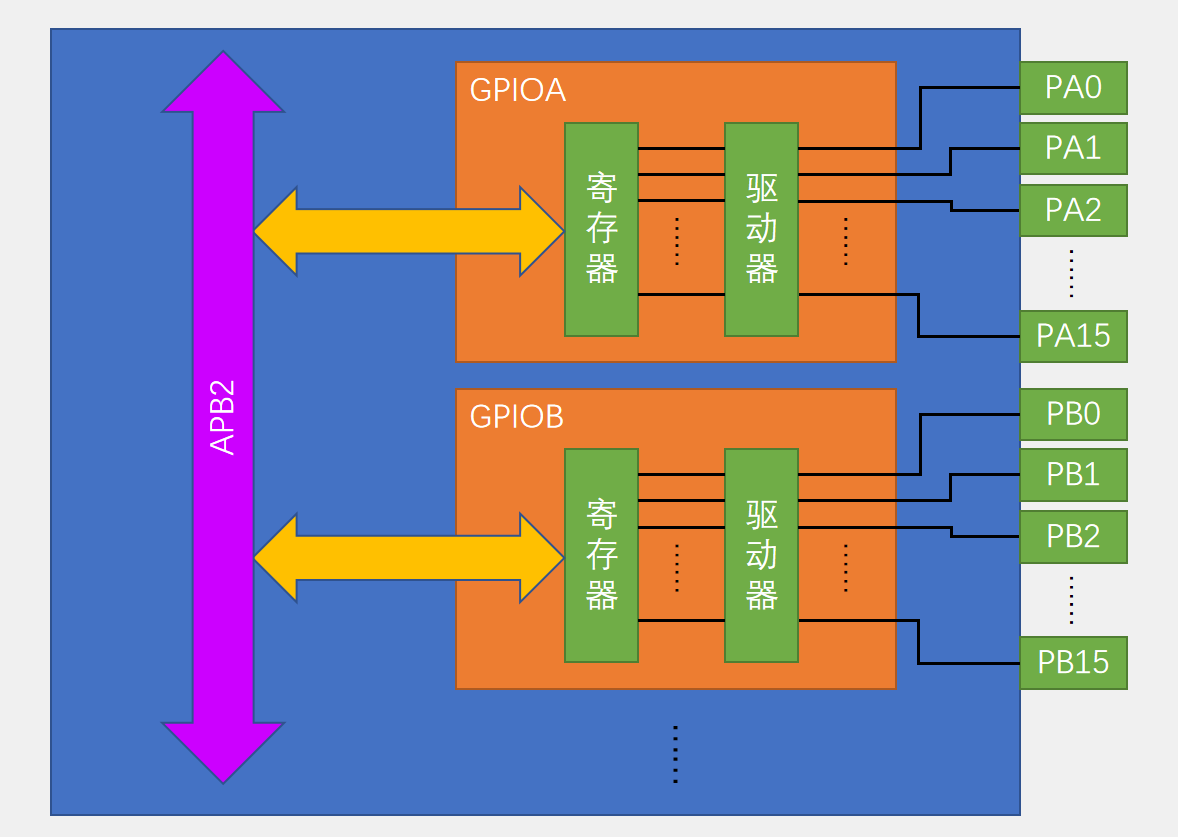
GPIO
简介
GPIO: General Purpose Input outPut 即通用输入输出口
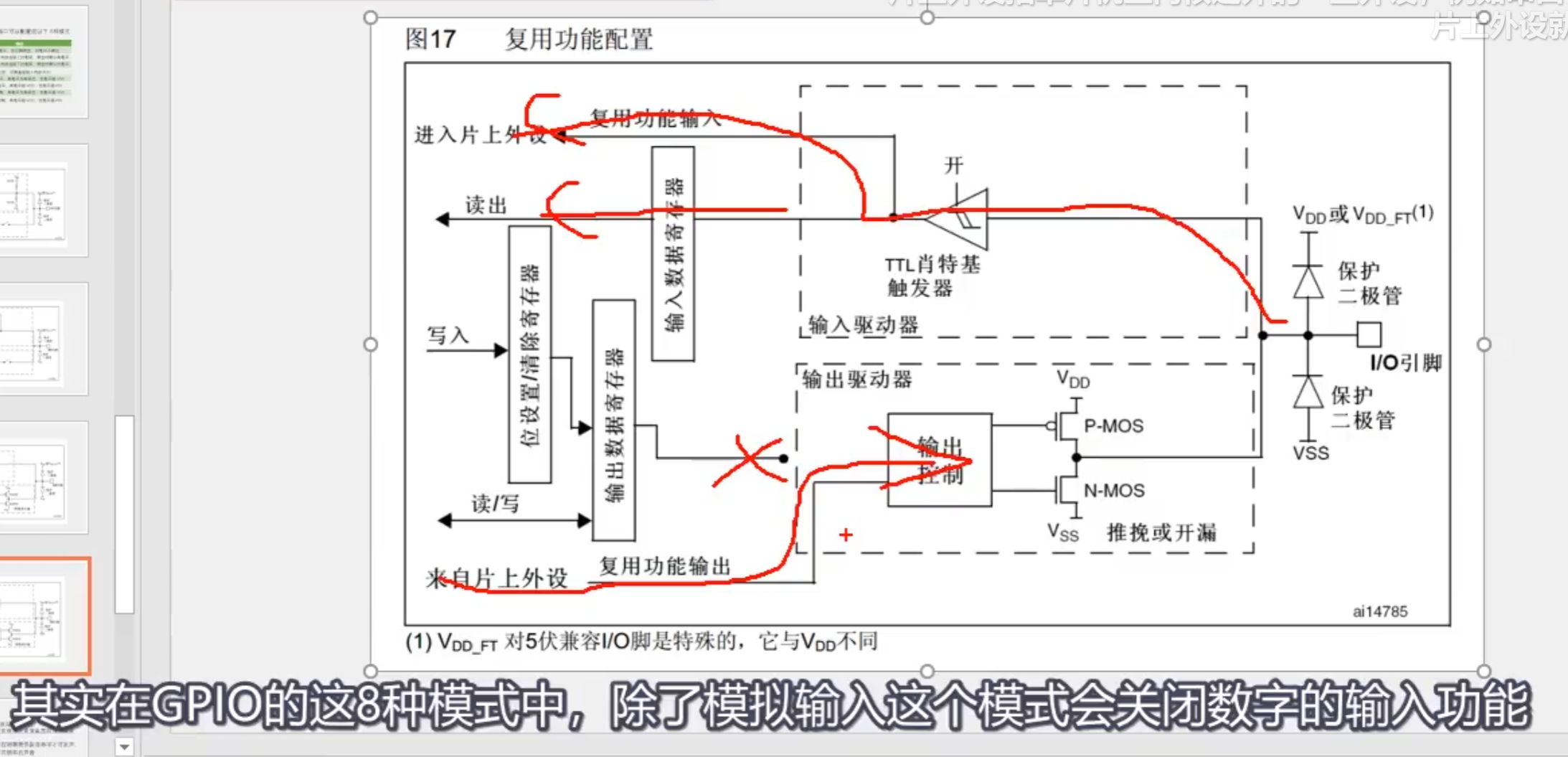
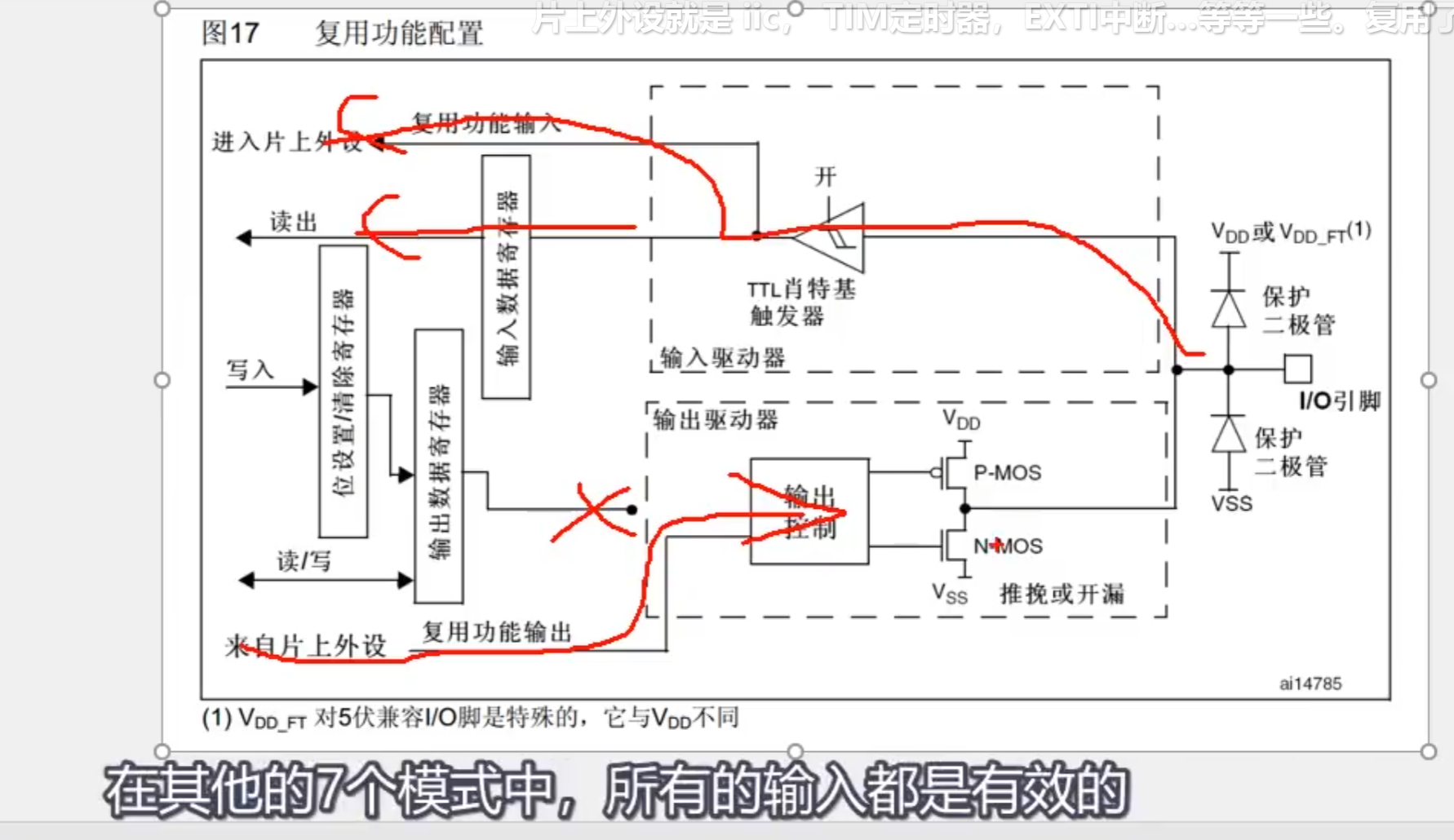
- 可配置为8种输入输出模式
- 引脚电平:3.3V
- 输出模式下可控制端口输出高低电平,用以驱动LED、控制蜂鸣器、模拟通信协议输出时序等
- 输入模式下可读取端口的高低电平或电压,用于读取按键输入、外界模块电平信号输入、ADC电压采集、模拟通信协议接收数据等
基本结构:GPIOA、GPIOB、GPIOC …
每个GPIO外设分为 [0-15] 16 个引脚
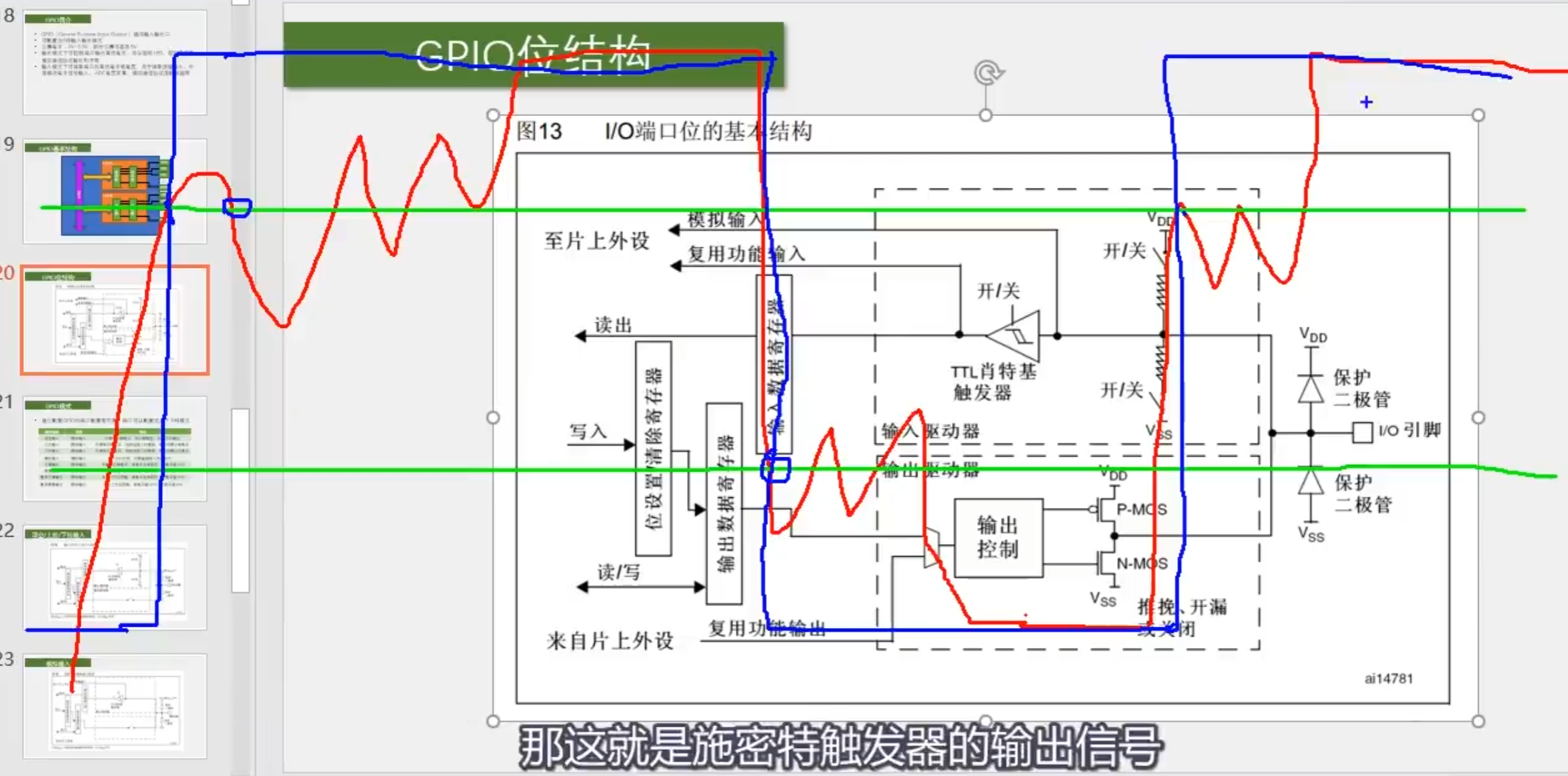
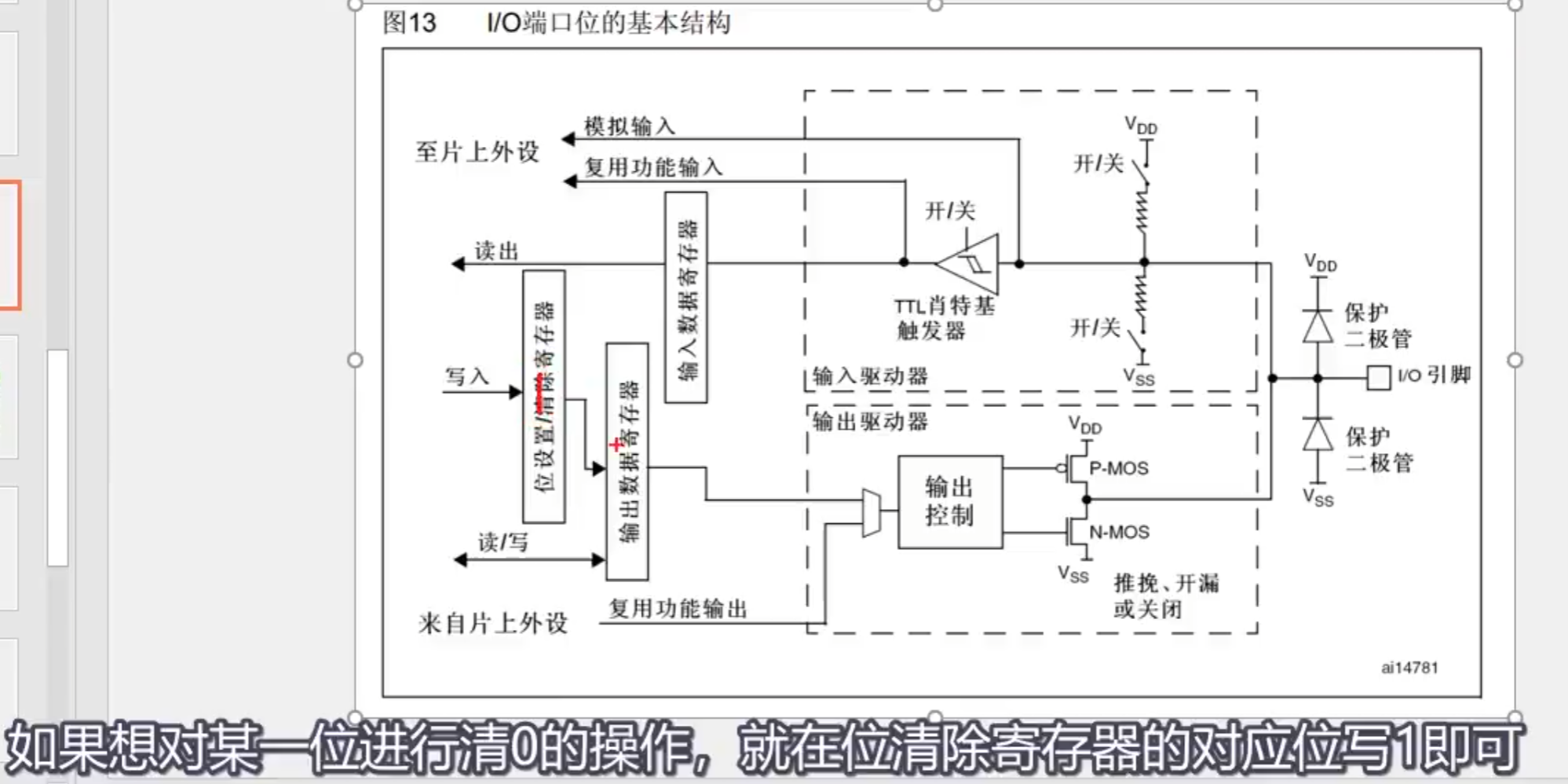
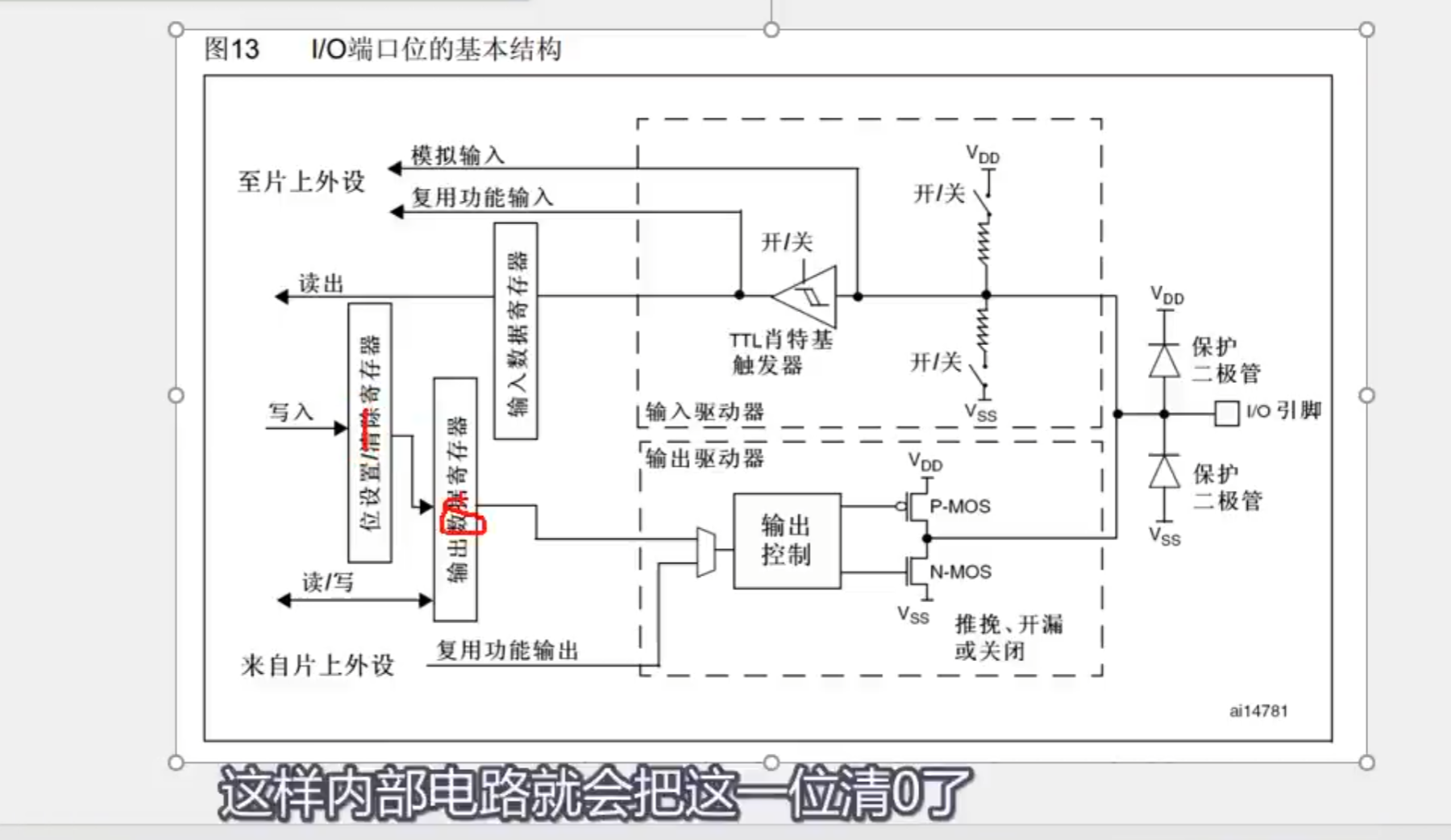
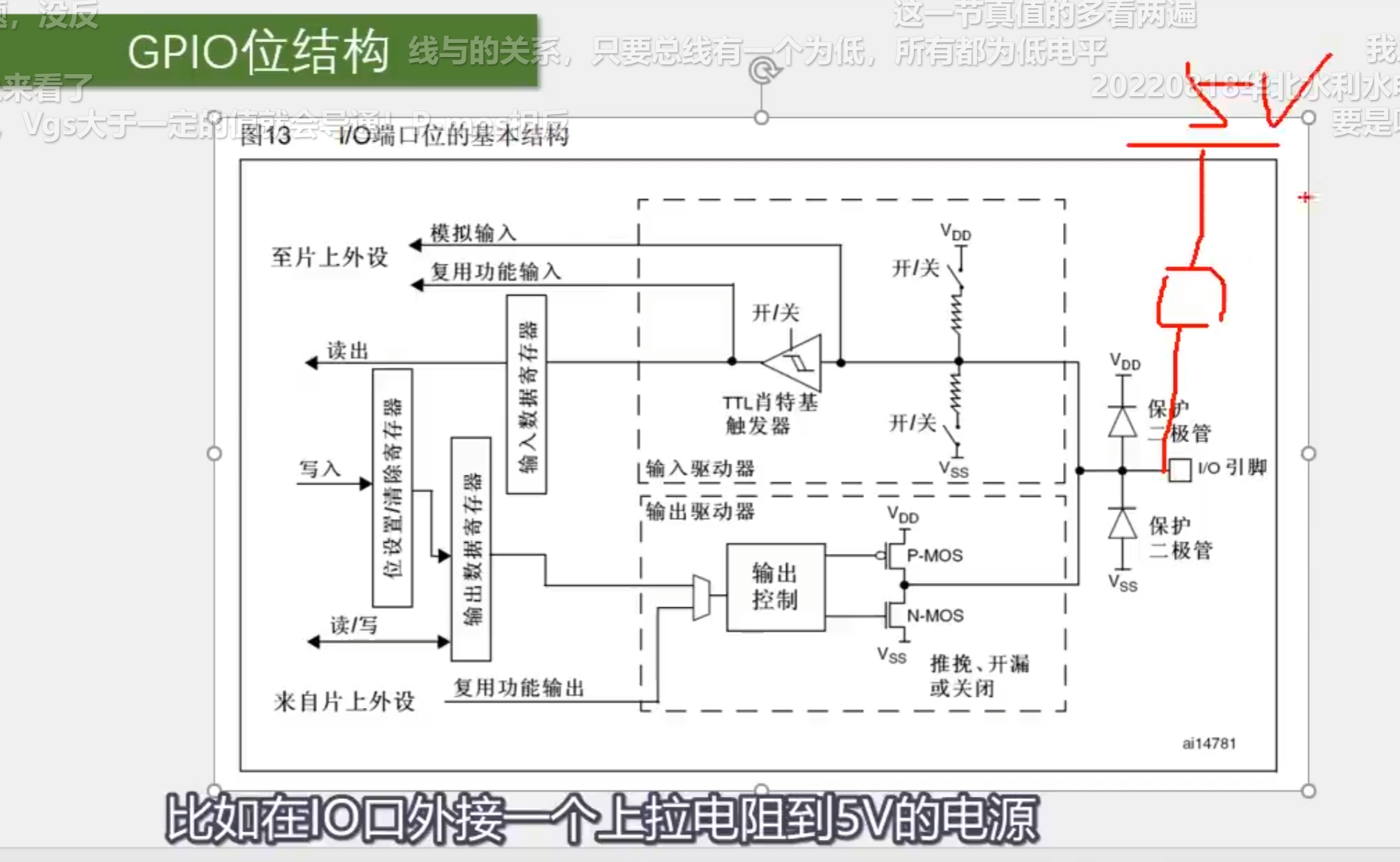
位结构
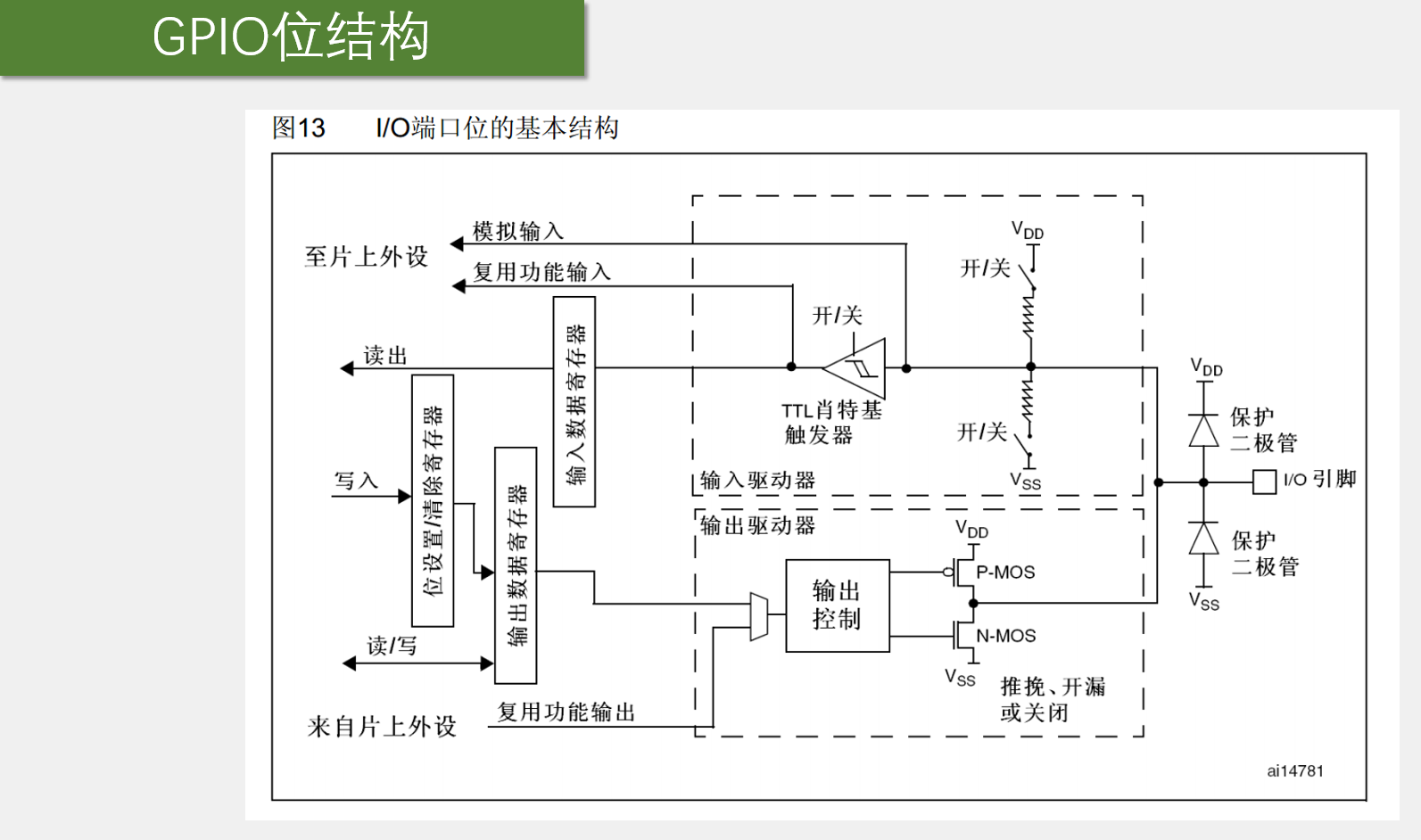
保护二极管:
- 大于3.3V不会进入内部电路,电流会流向【上方的保护二极管】,避免过高电压对内部产生伤害。
- 相对于【下方的保护二极管】比0V还要低的电压,电流会直接从【下方的保护二极管】回到【I/O引脚】。
【文中翻译错误】施密特触发器【电压整形】:当输入电压大于某一阈值时,输出就会瞬间升为高电平;当输入电压小于某一阈值时,输出就会瞬间降为低电平。
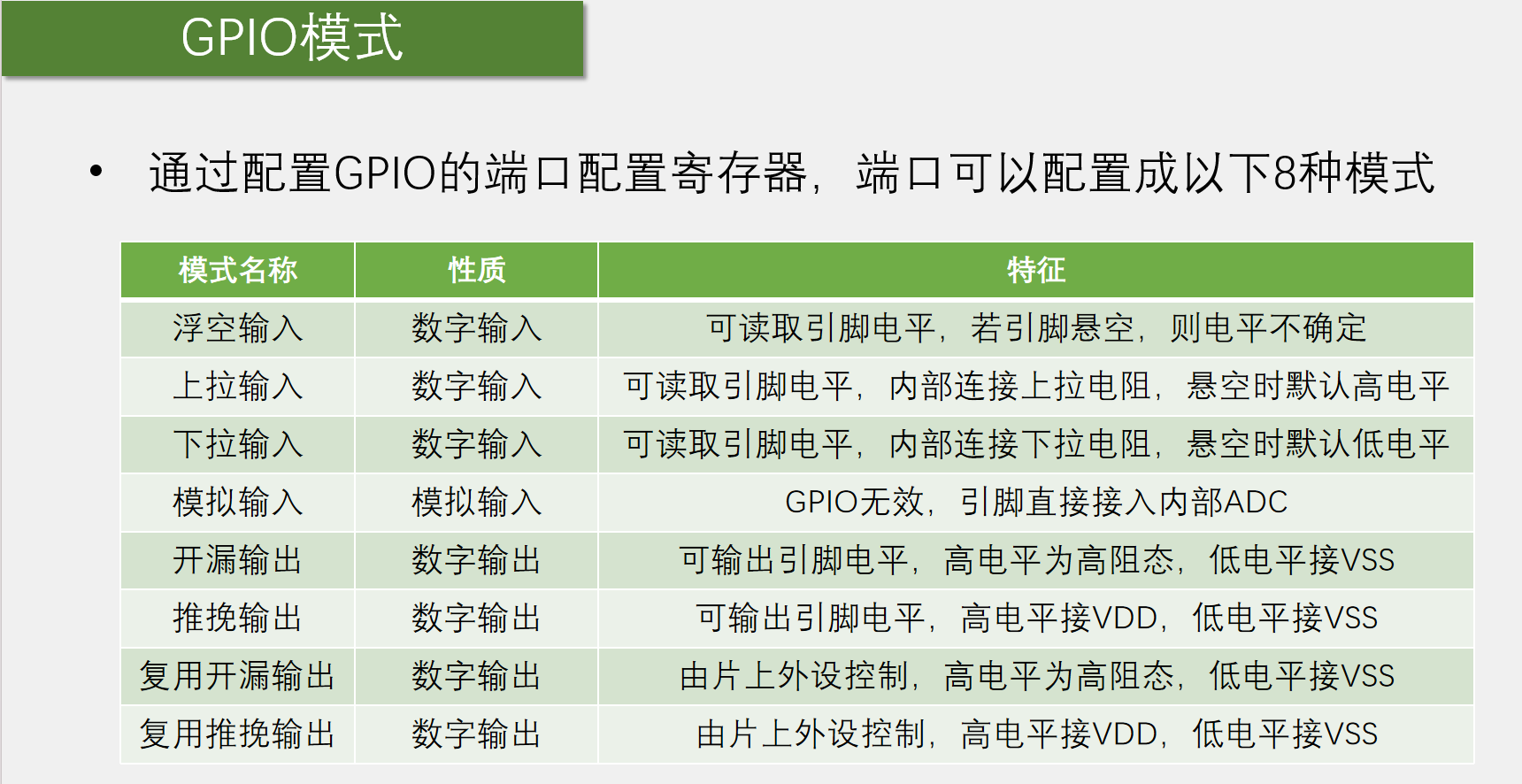
GPIO模式
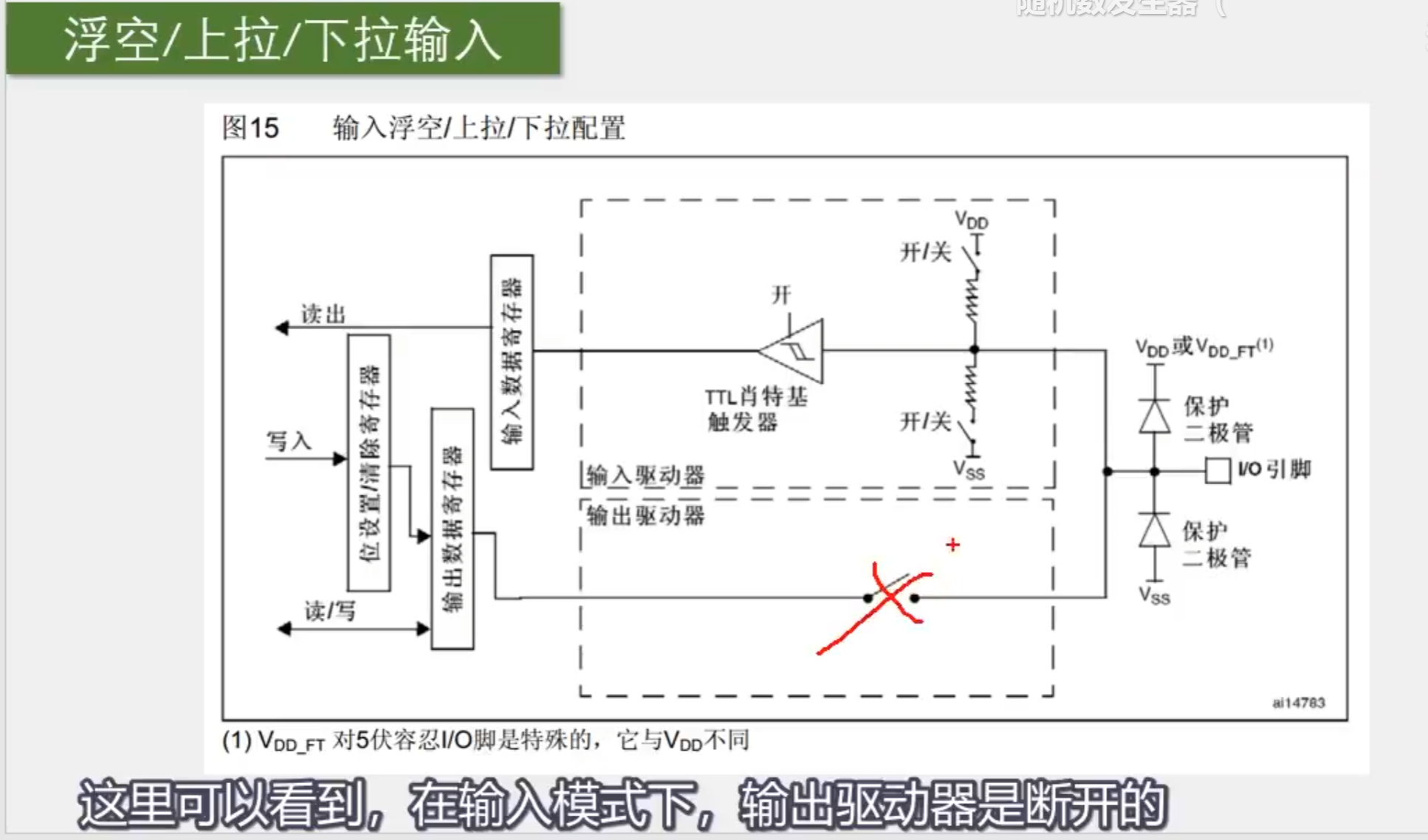
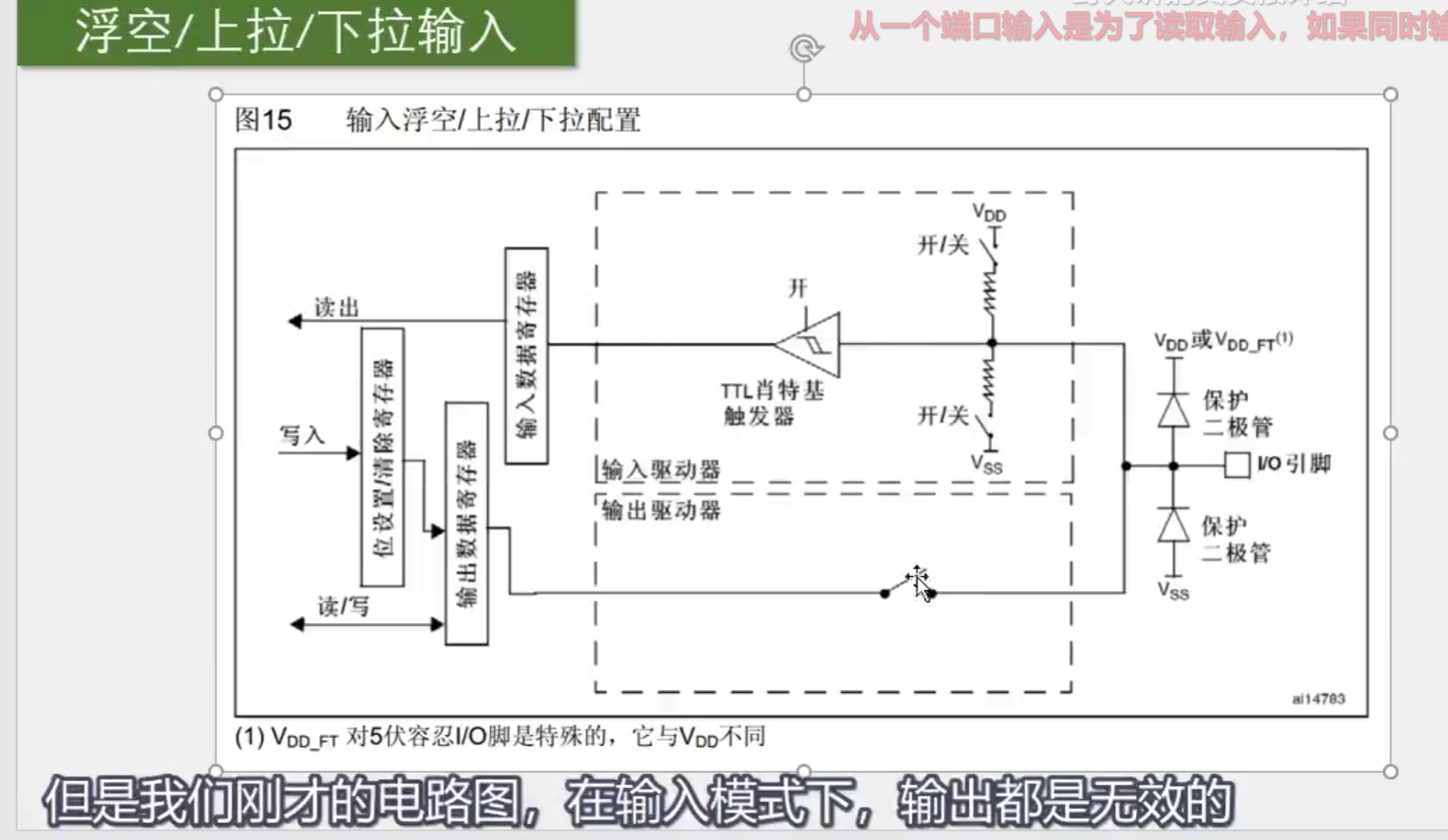
浮空/上拉/下拉
IN_FLOATING-浮空输入:【两个开关都断开】
IPU-上拉输入:【上拉开关导通,下拉断开】
IPD-下拉输入:【上拉断开,下拉开关导通】
PS:
- 上拉和下拉输入的作用在于提供一个默认的电平;【上拉输入默认高电平输入模式,下拉输入默认低电平输入模式】
- 上拉和下拉的电阻较大,是一种弱上拉和弱下拉,目的是尽量不影响正常的输入操作。
- 而啥都不接,则处于一个浮空的状态,引脚的电平极易受到外界干扰而改变。
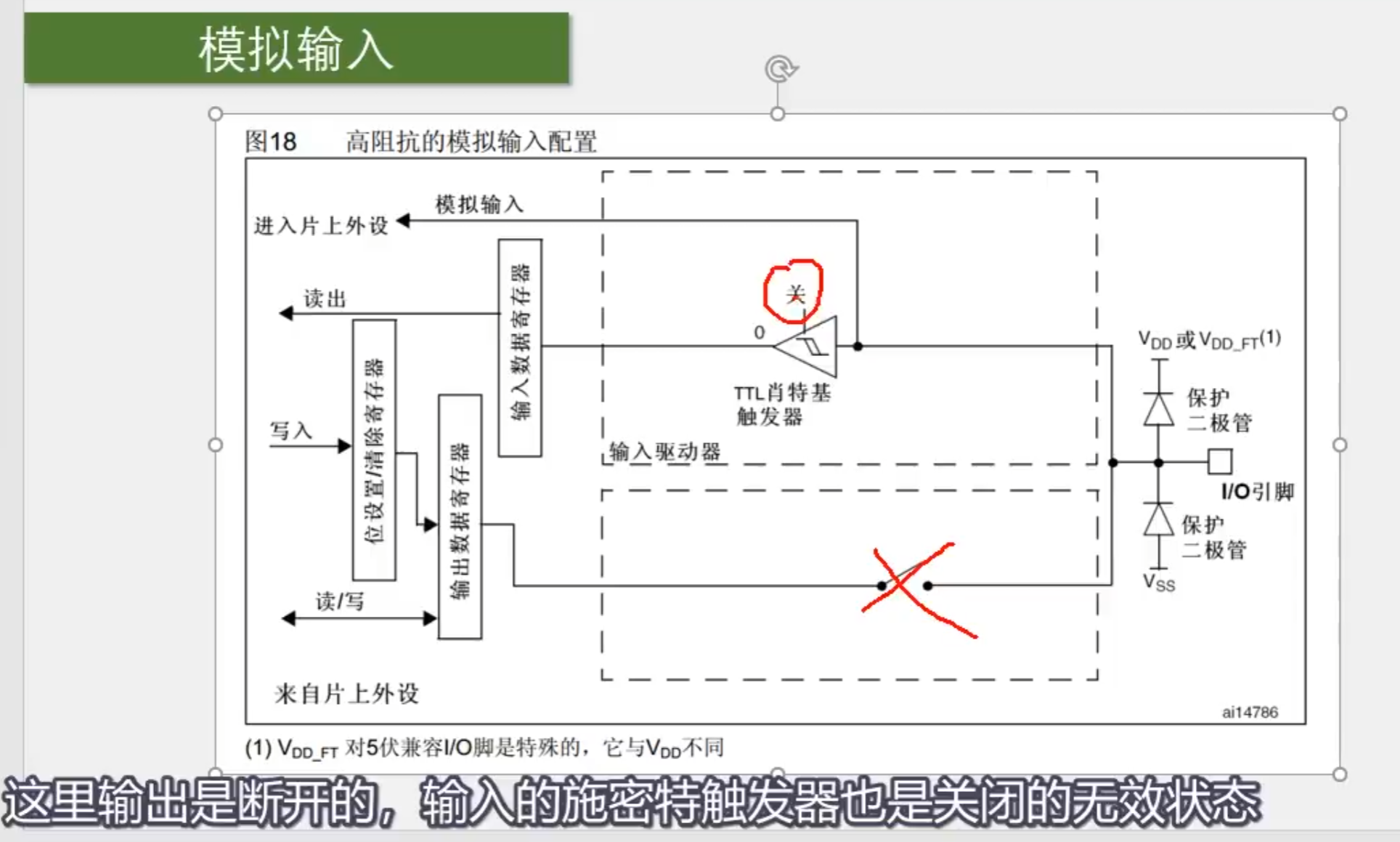
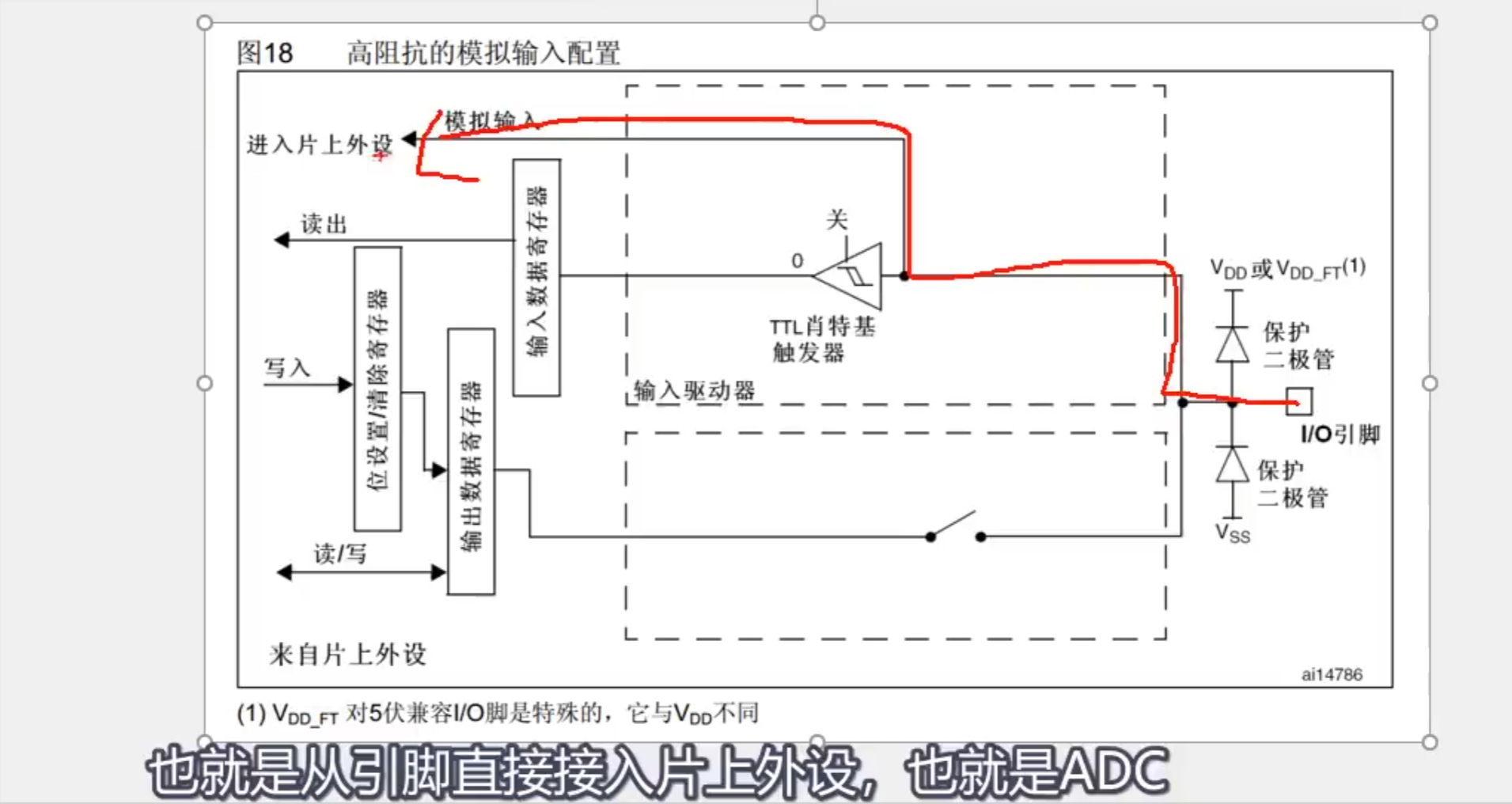
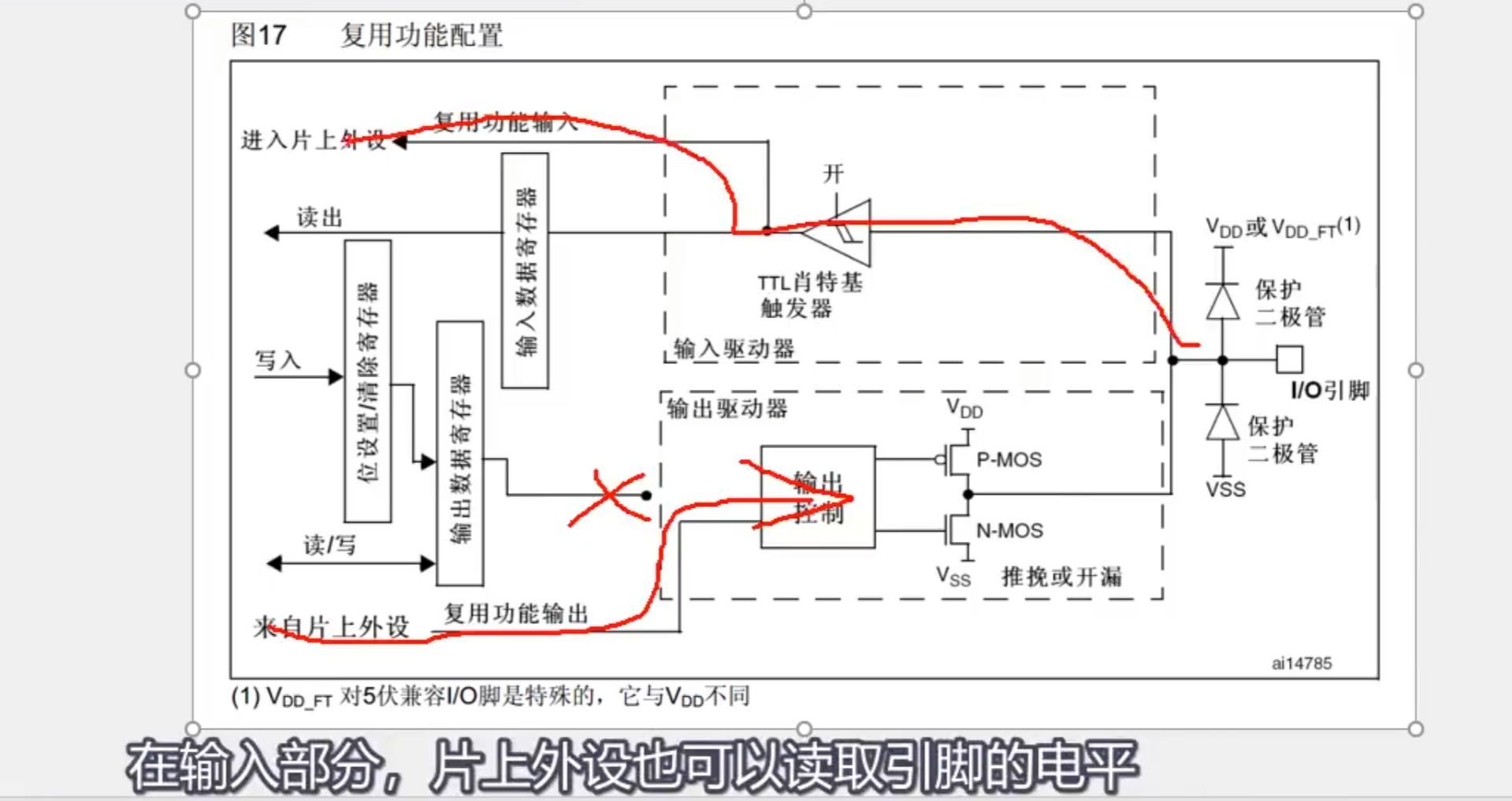
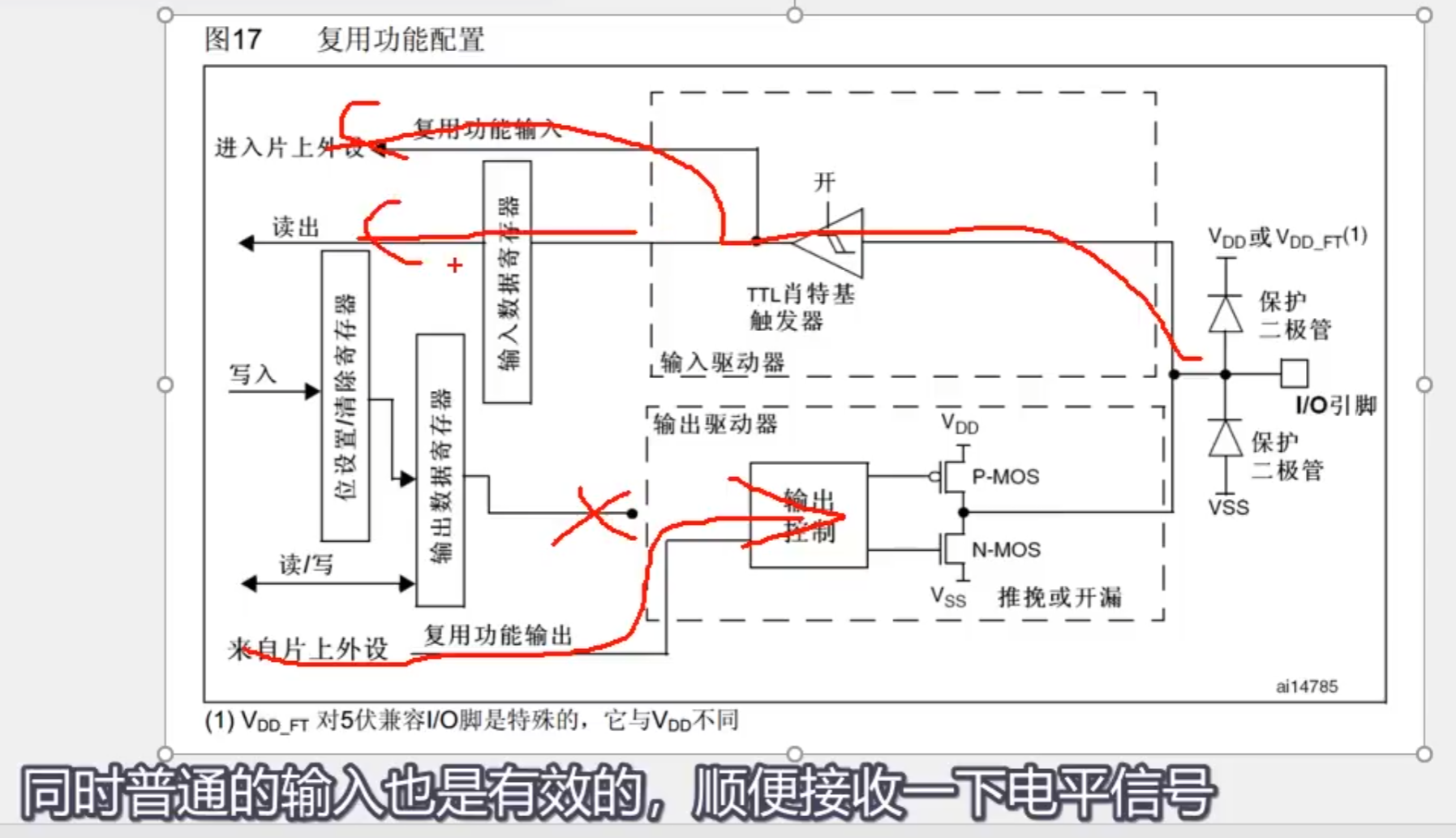
模拟输入
AIN-模拟输入:连接到ADC,因为ADC需要输入模拟量【模拟量就是连续的,不需要整形】,所以它的线是接到施密特触发器前面的。
寄存器
【复用功能输入】:连接到其他需要读取端口的外设上的,比如串口的输入引脚等,这根线接收的是数字量,所以接在施密特触发器后面。
【输出数据寄存器】:普通IO输出
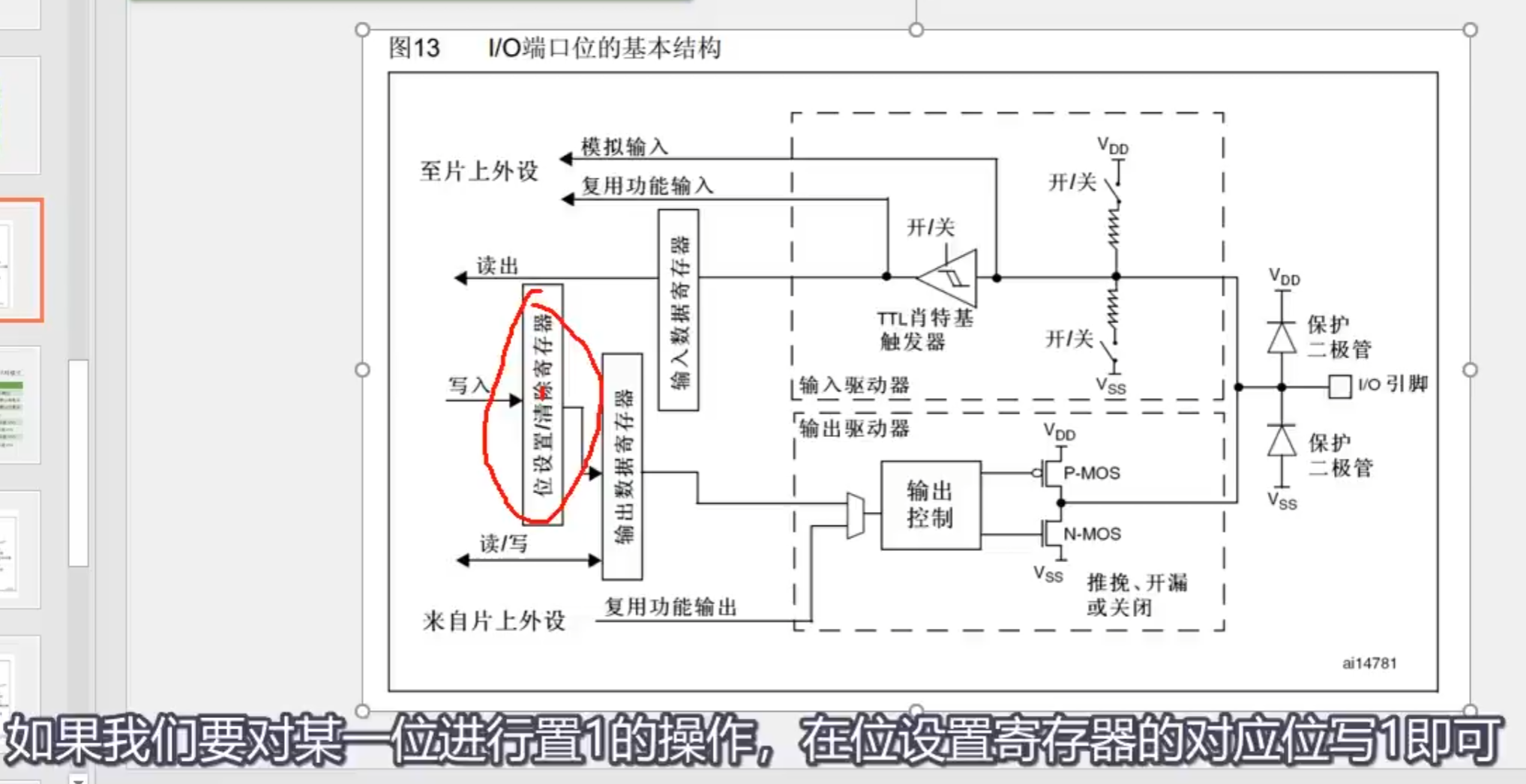
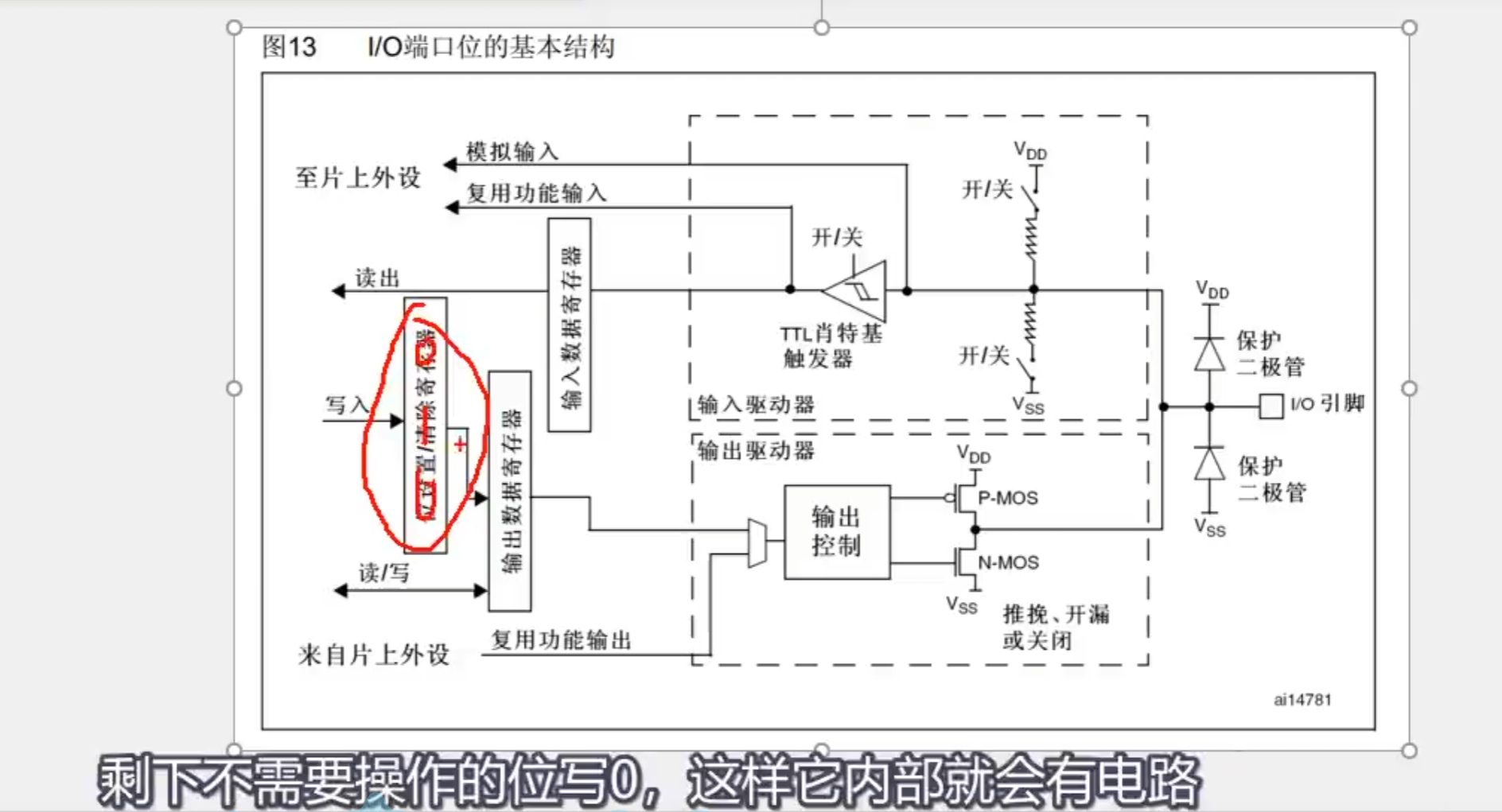
【位设置/清除寄存器】:单独操作输出数据寄存器的某一位,而不影响其他位。因为这个【输出数据寄存器】同时控制16个端口,并且只能同时整体读写,所以如果想单独控制其中某一端口而不影响其他端口的话,需要一些特殊的方式。
- 第一种:先读这个寄存器,然后用【按位与
&=】和【按位或|=】的方式更改某一位。 - 第二种:通过设置这个【位设置/清除寄存器】,操作见下图:
【位设置操作】:
【位清除操作】:
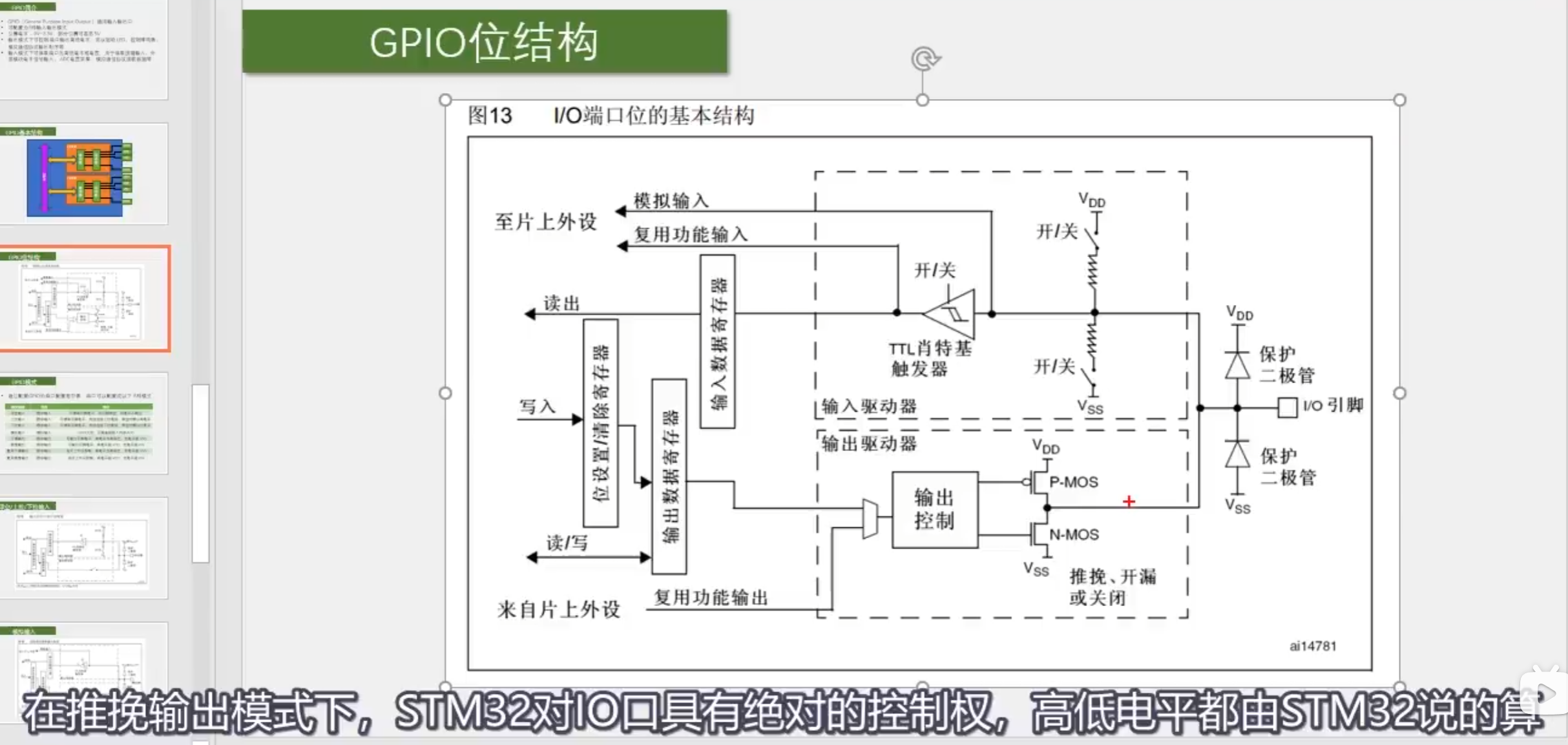
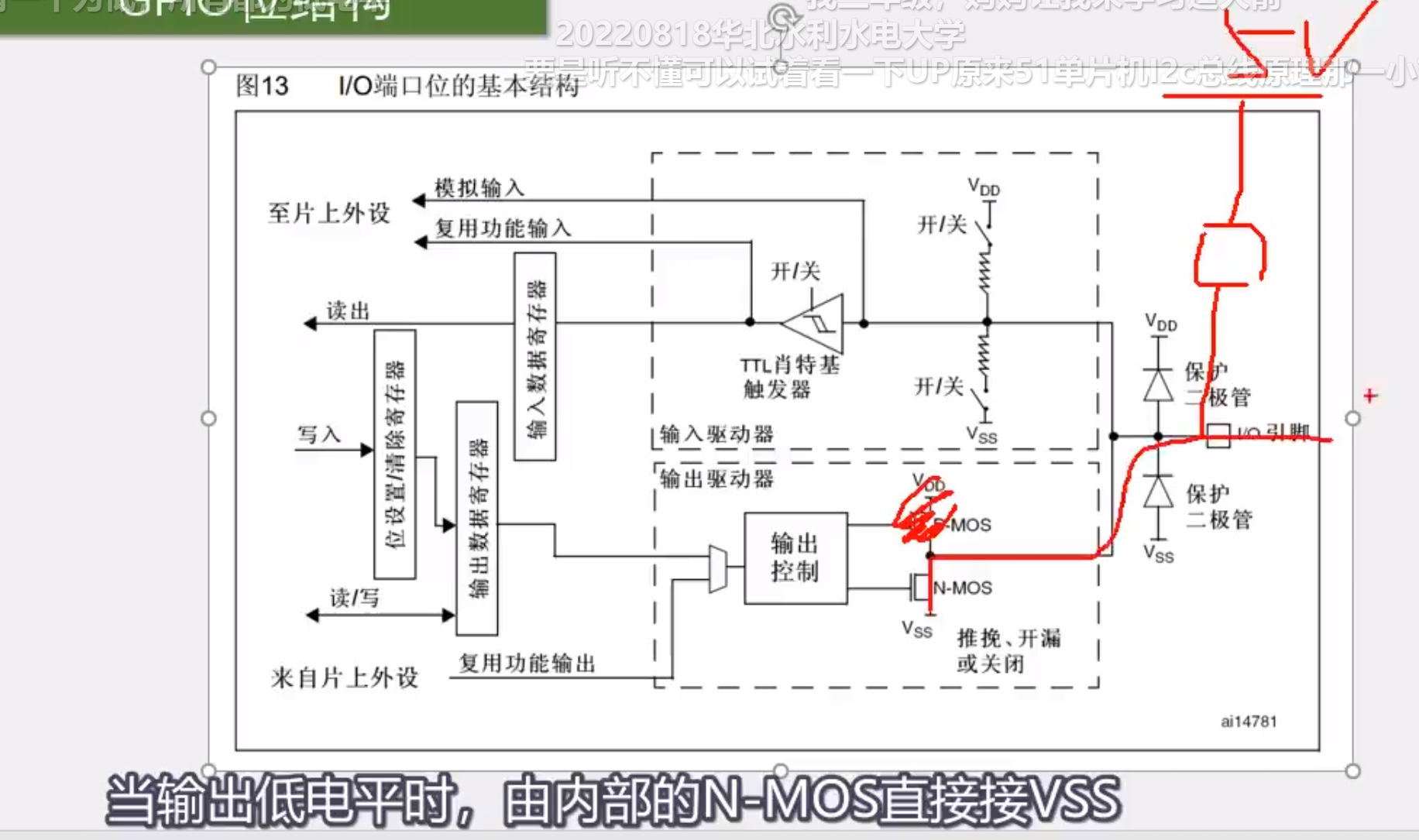
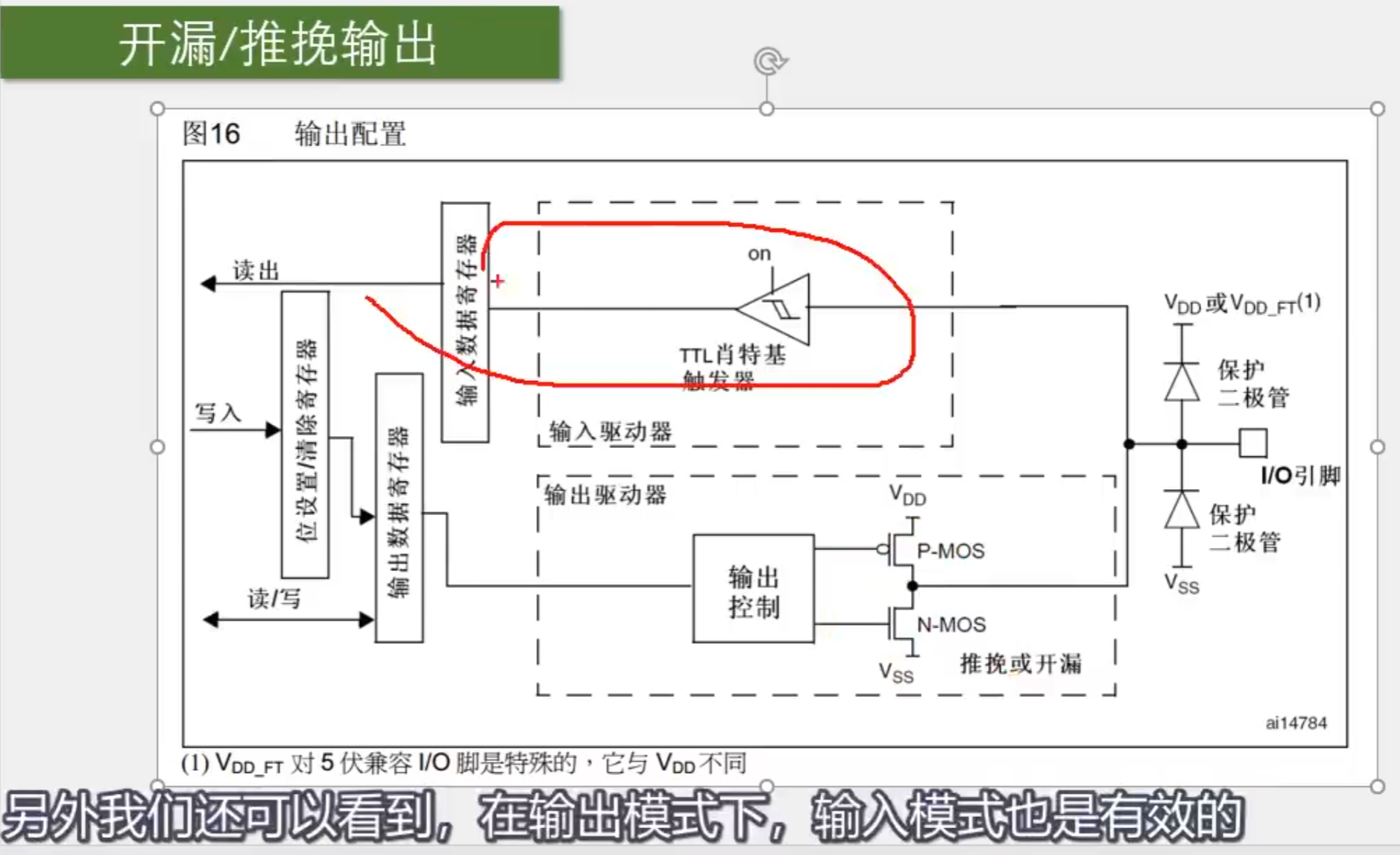
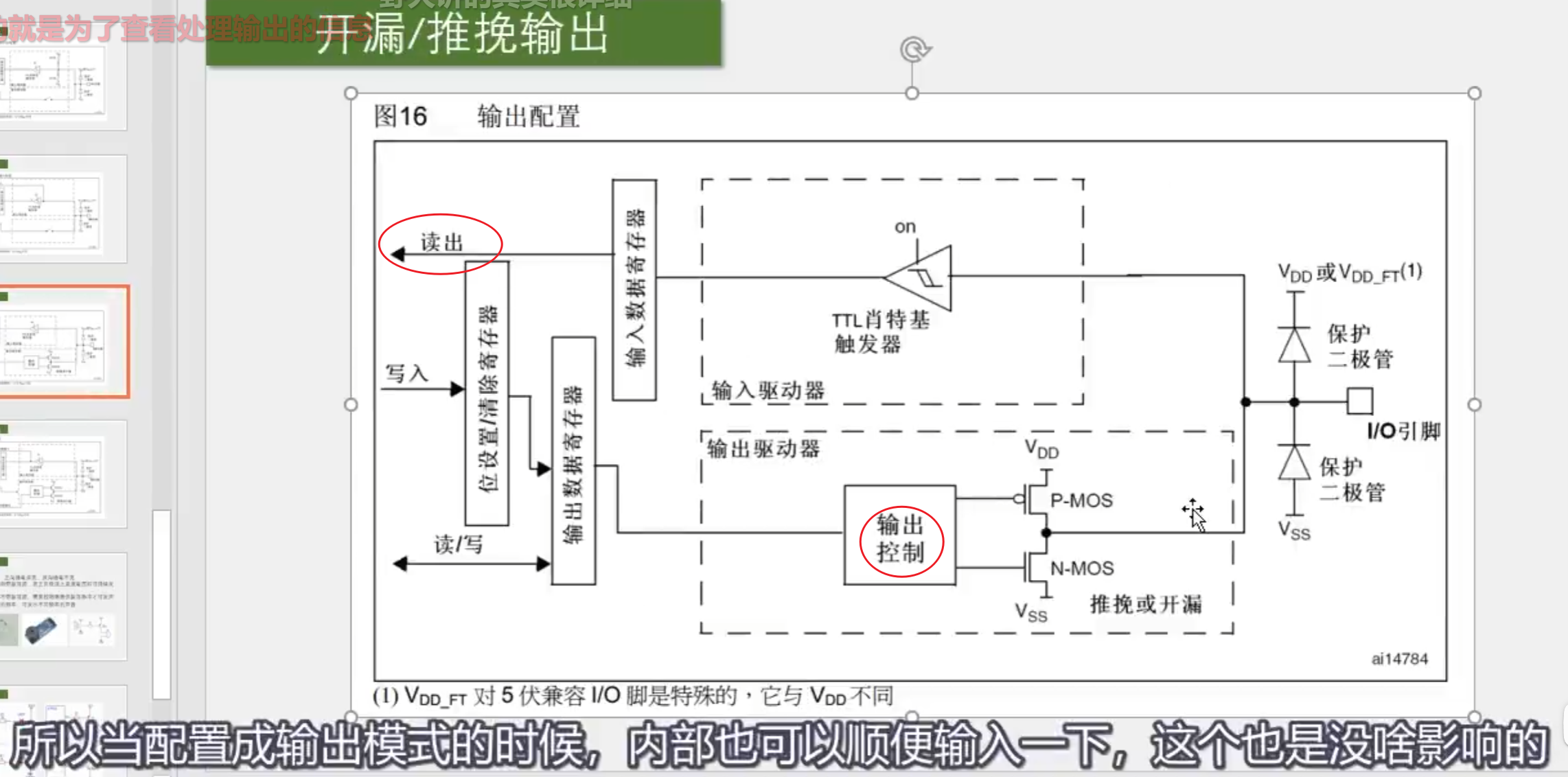
推挽/开漏/关闭
Out_PP-推挽输出:
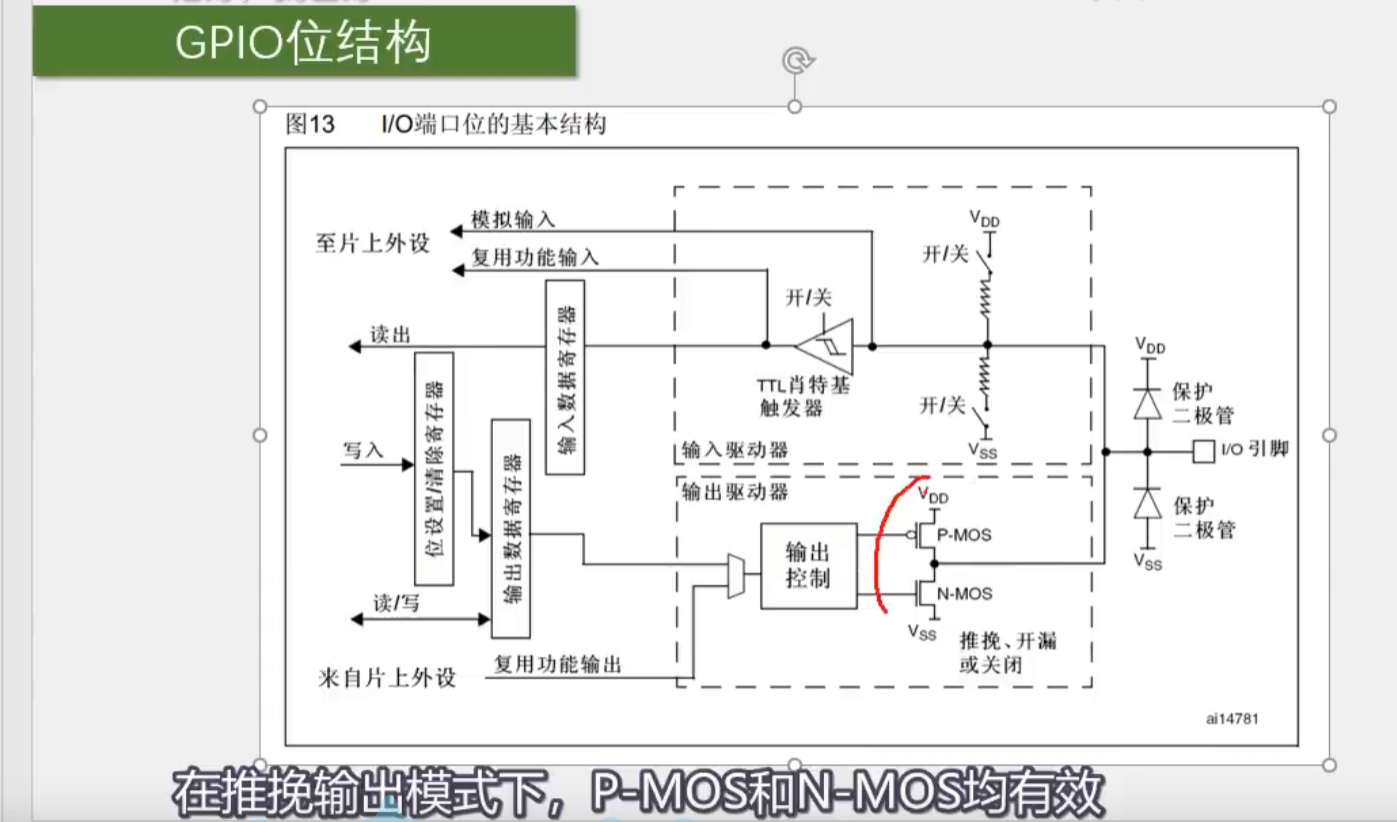
在Out_PP-推挽输出模式下,【MOS前虽然有取反标志,但是可能还有取反器,所以负负得正?待求证】
数据寄存器为1时,上管导通,下管断开,输出直接接到VDD,就是输出高电平;
数据寄存器为0时,下管导通,上管断开,输出直接接到VSS,就是输出低电平。
这种模式下,高低电平均有较强的驱动能力,所以推挽输出模式也可以叫强推输出模式。
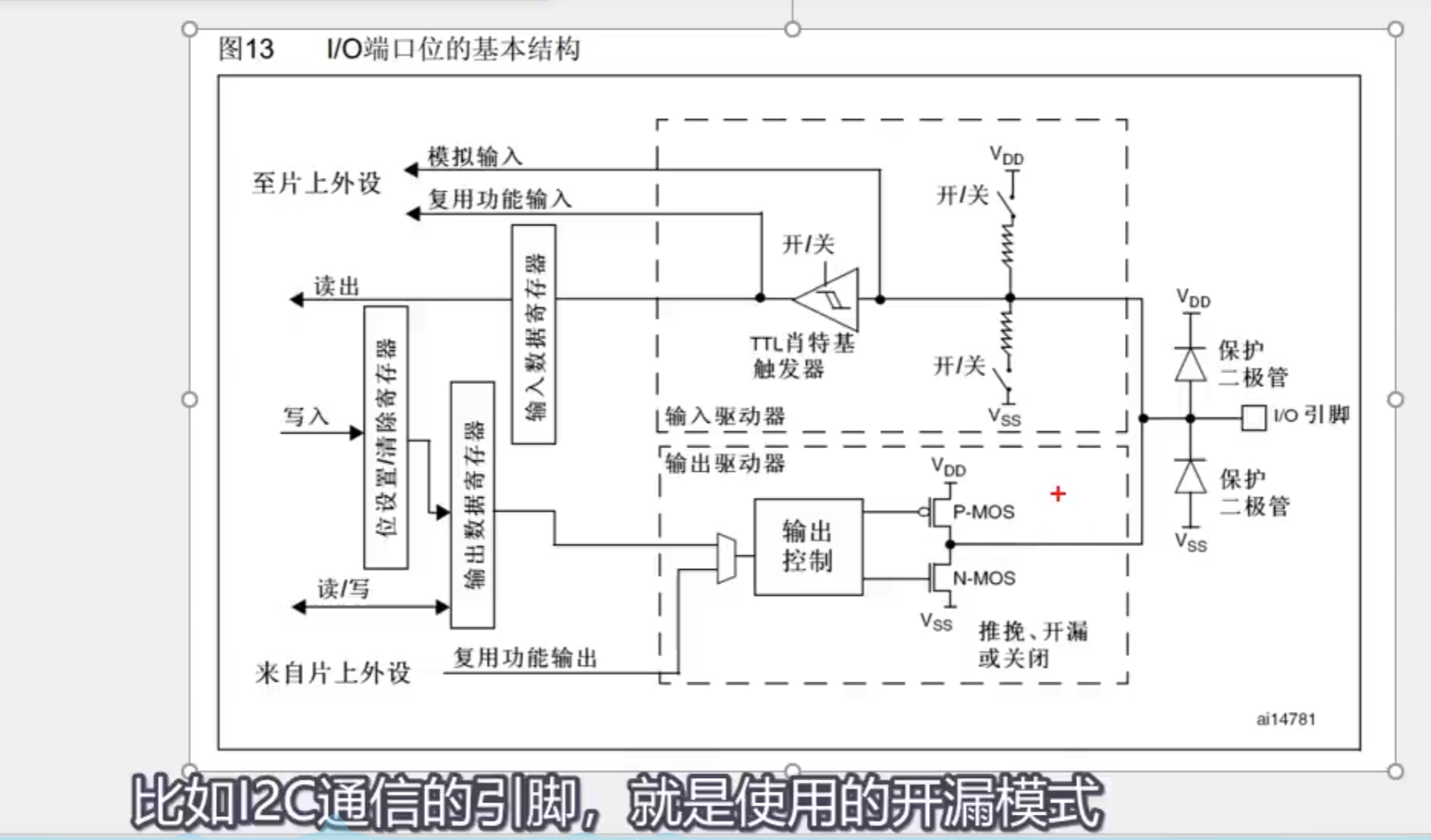
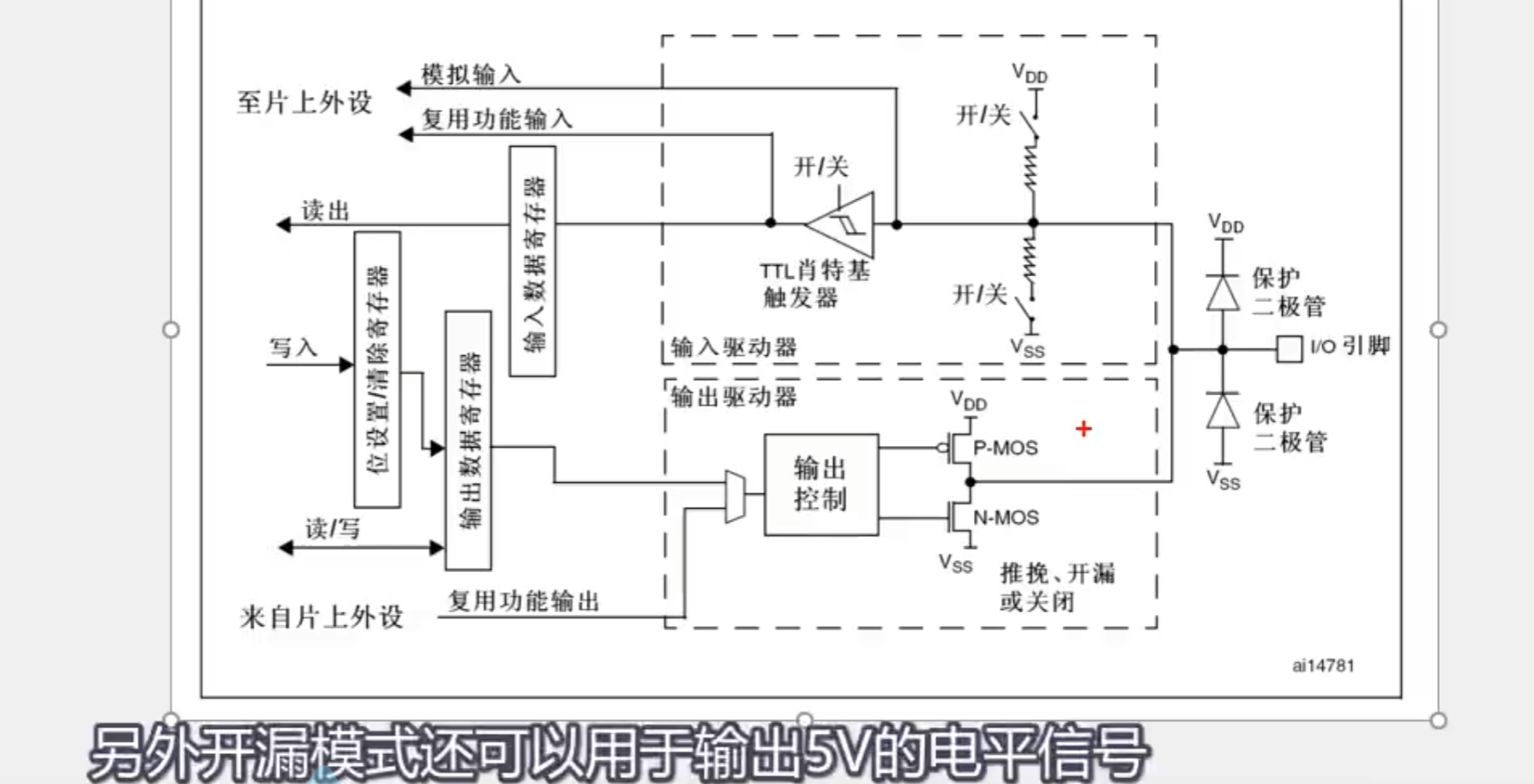
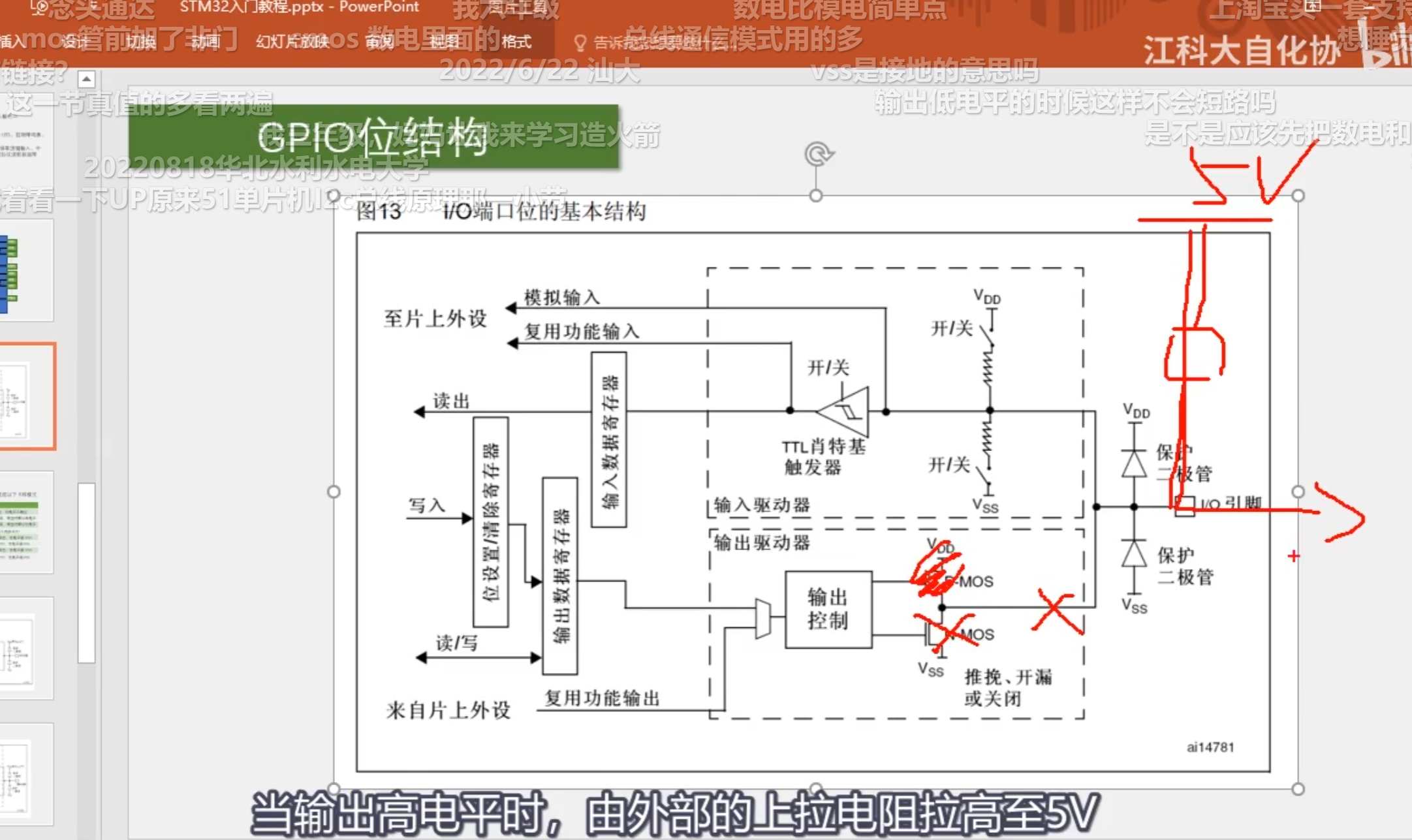
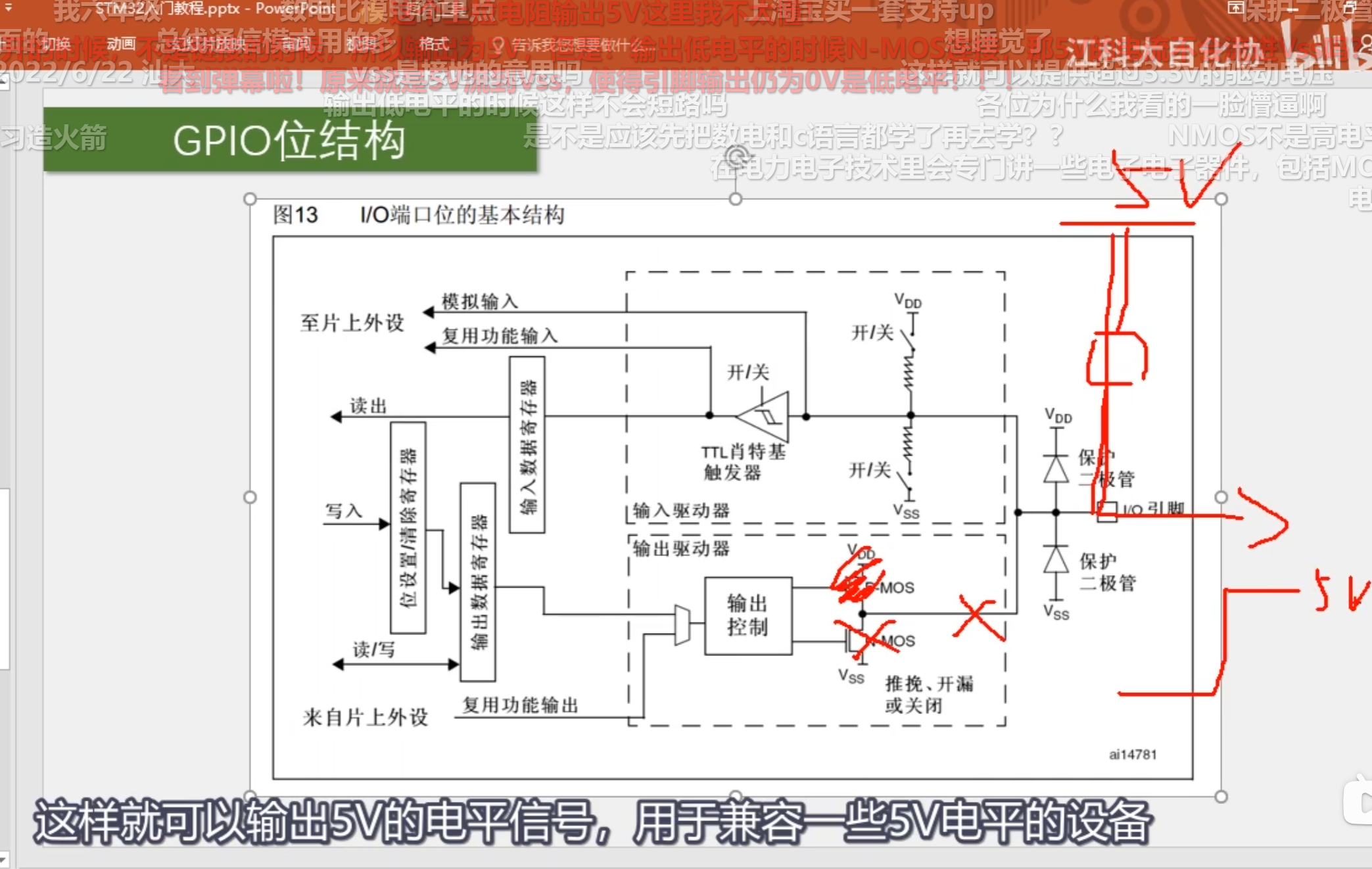
Out_DD-开漏模式:
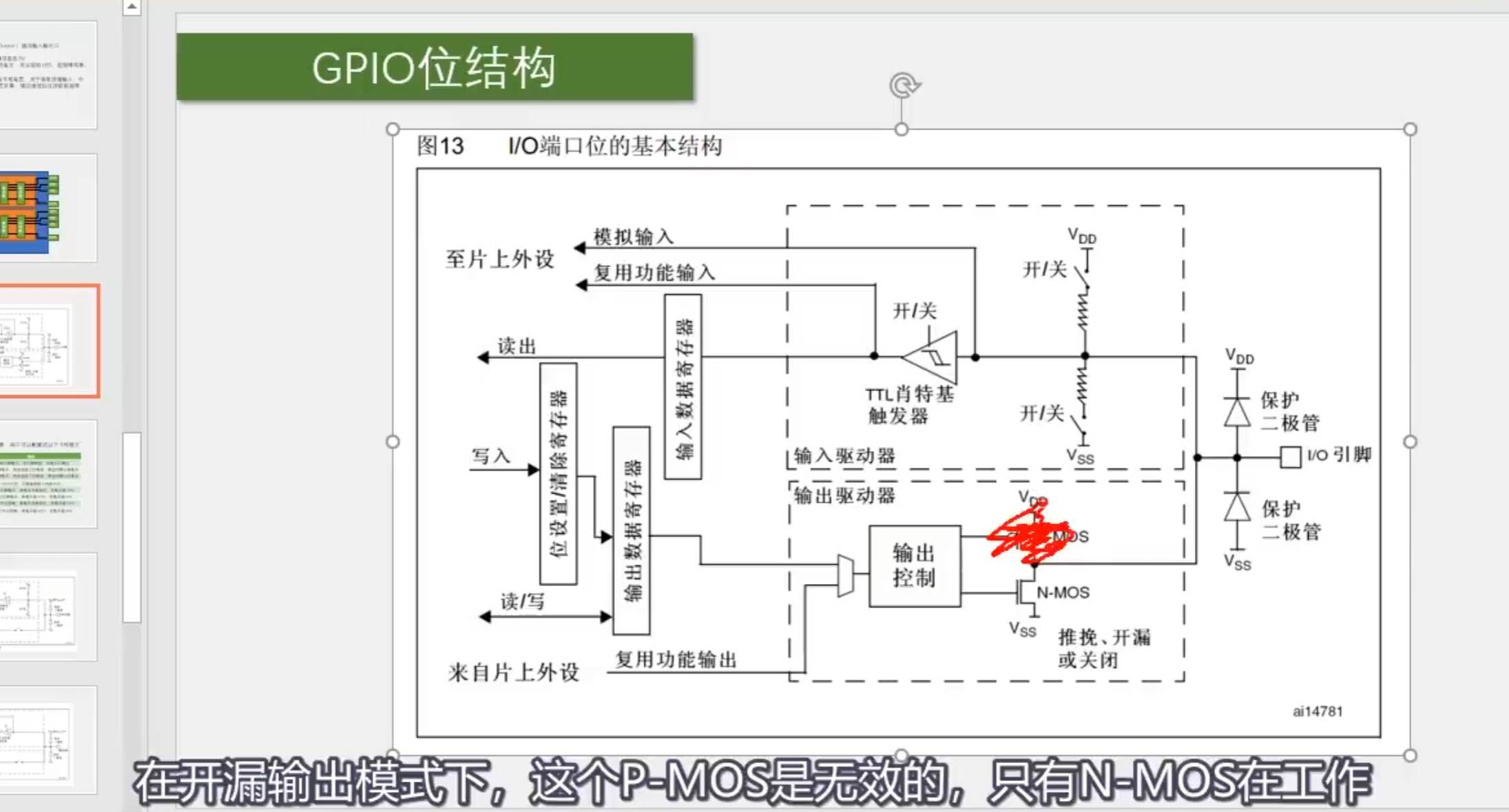
数据寄存器为1时,下管断开,高阻模式;数据寄存器为0时,下官导通,输出低电平。
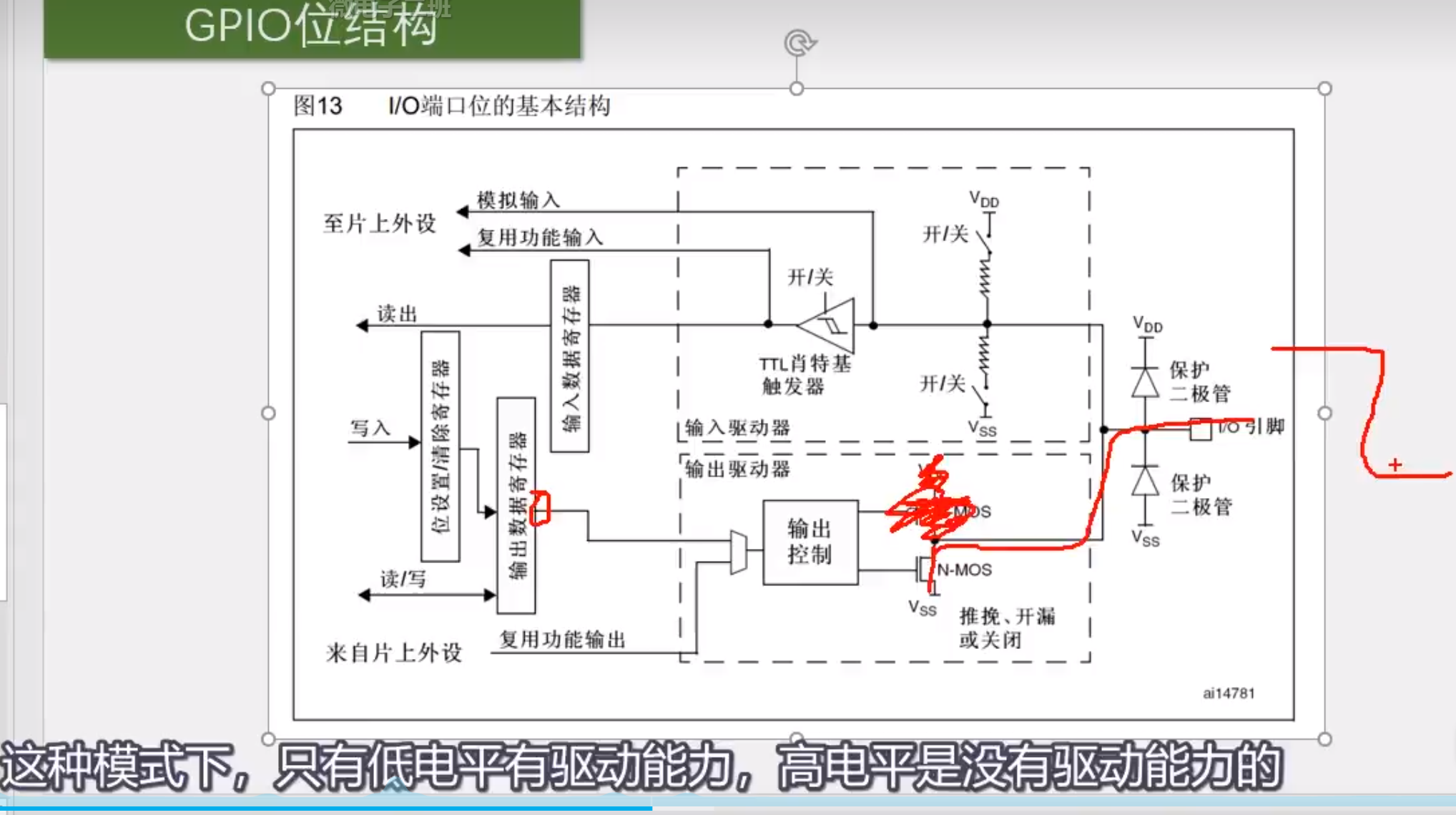
作用:这个开漏模式可以作为通信协议的驱动方式。
关闭:
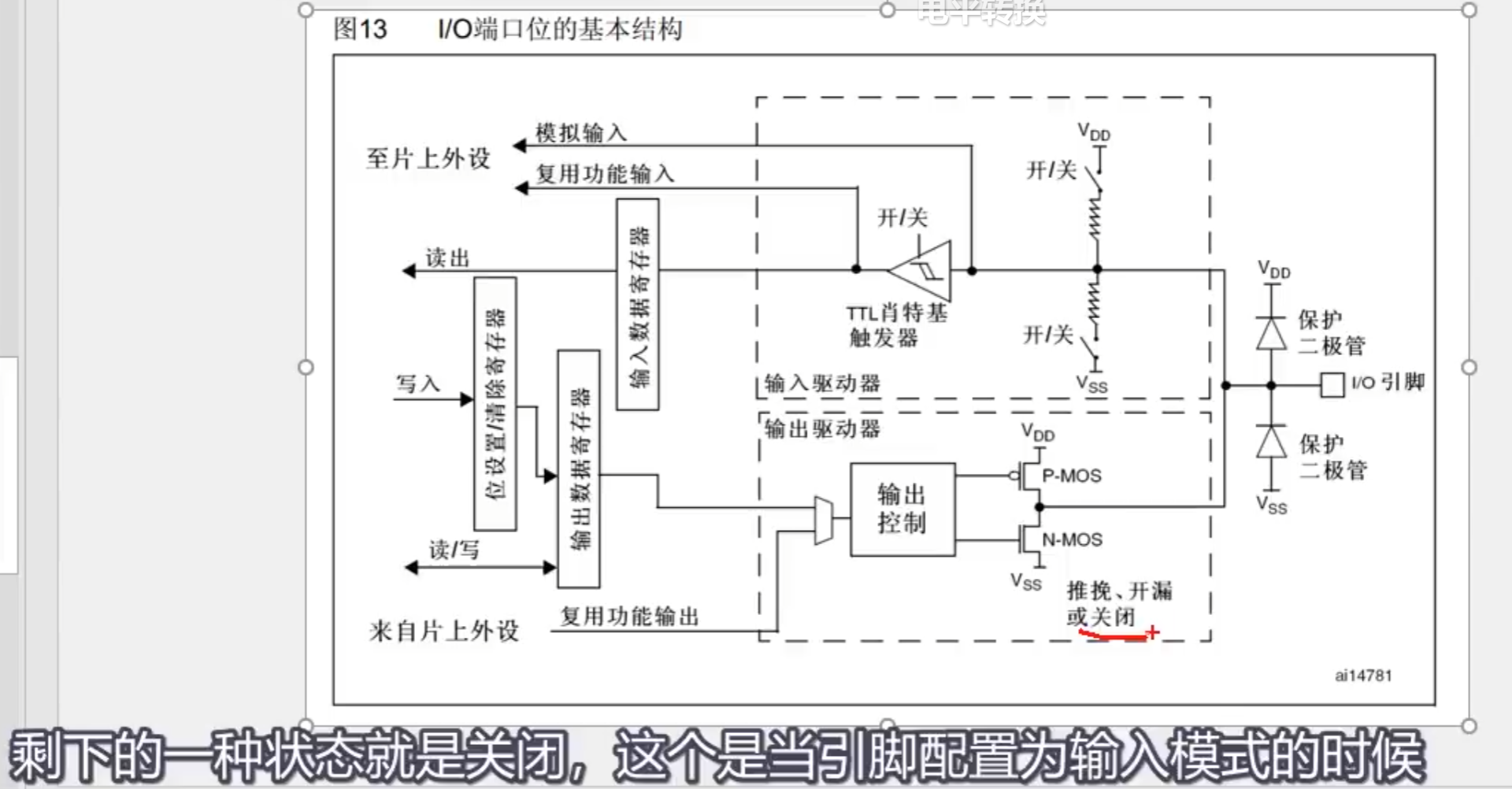
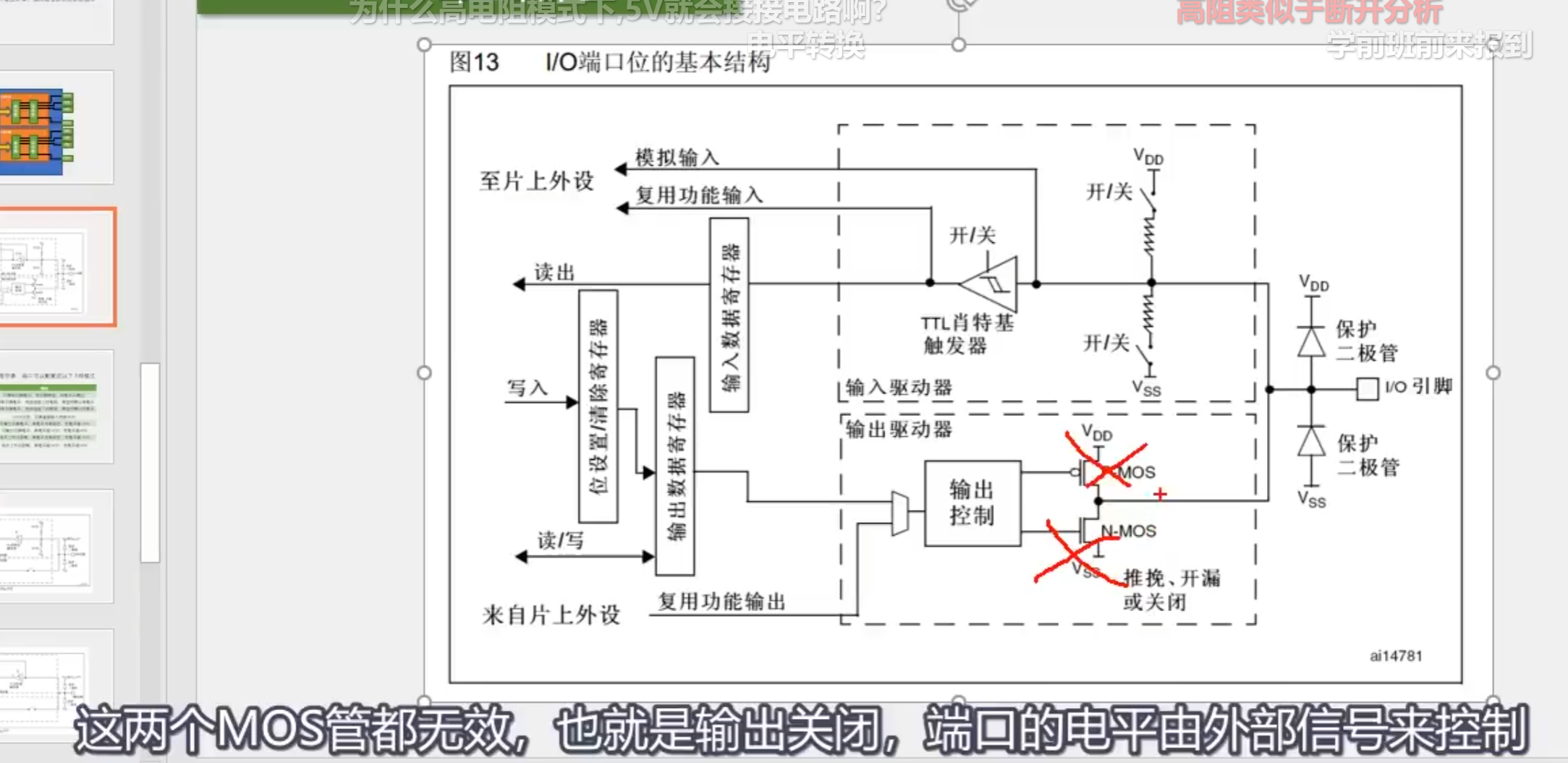
小结:
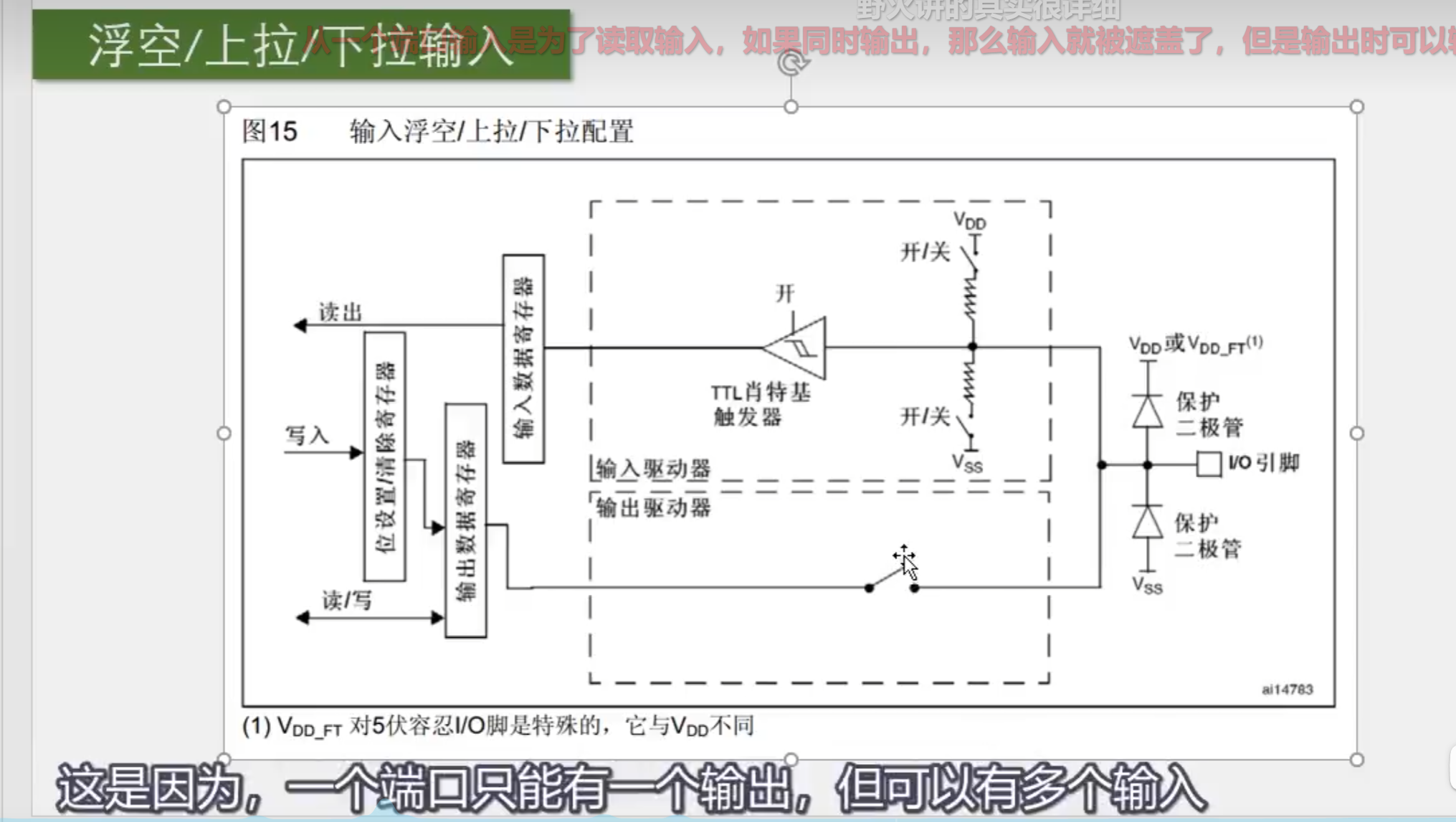
从一个端口输入是为了读取输入,如果同时输出,那么输入就被遮盖了,但是输出时可以输入,目的就是为了查看处理输出的信息
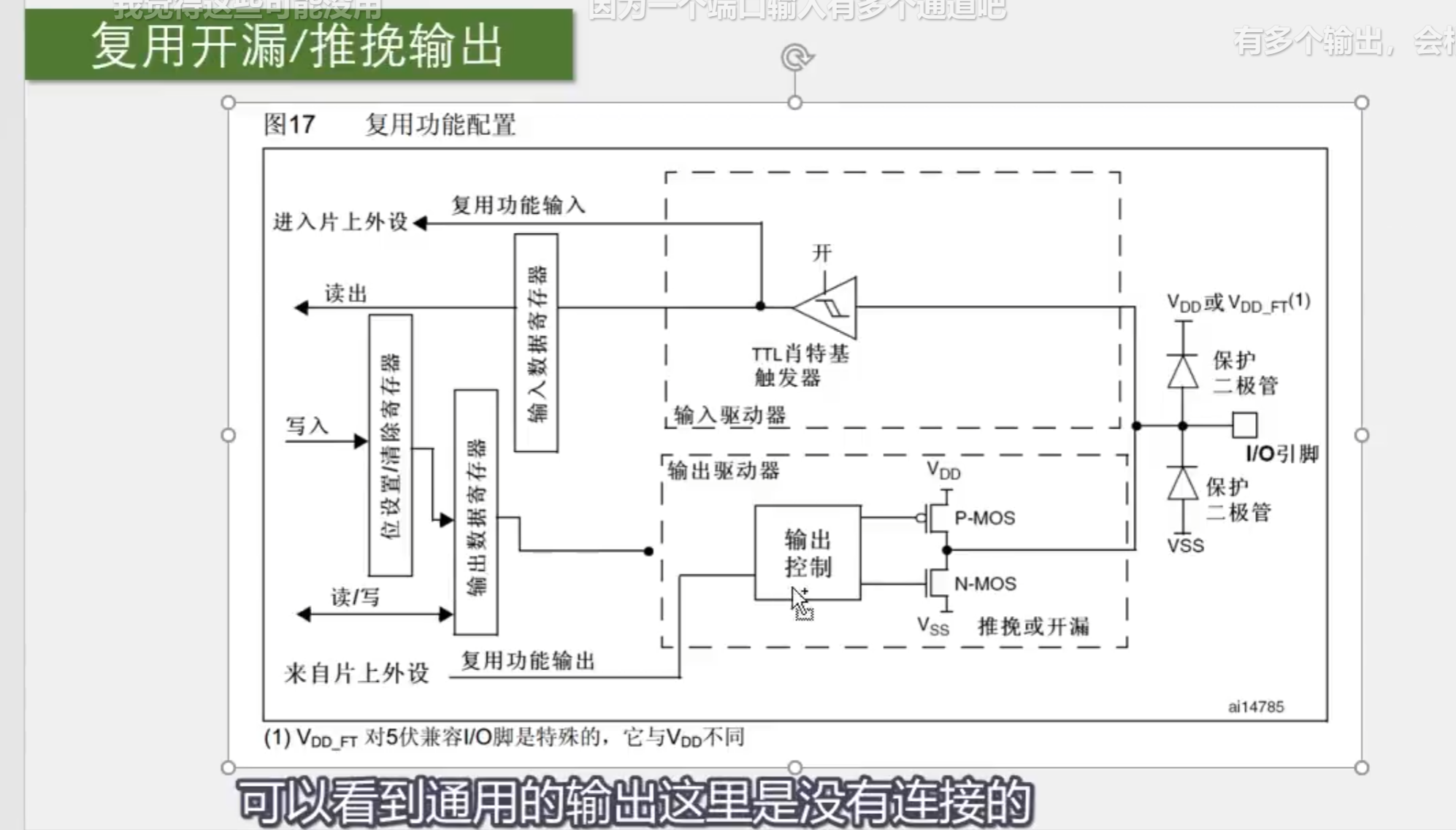
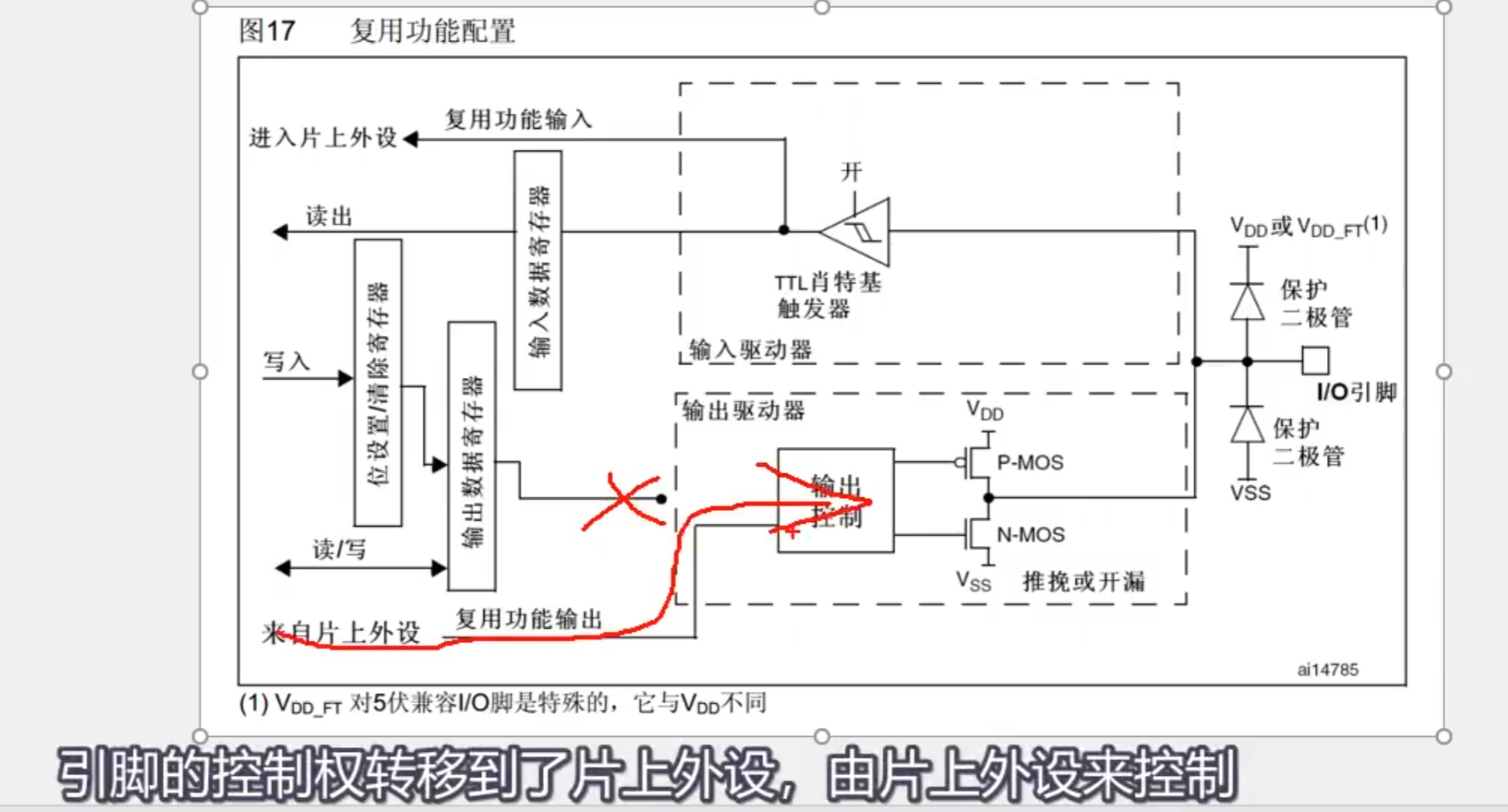
复用开漏/推挽
【AF_OD 复用开漏】 和 【AF_PP 推挽输出】
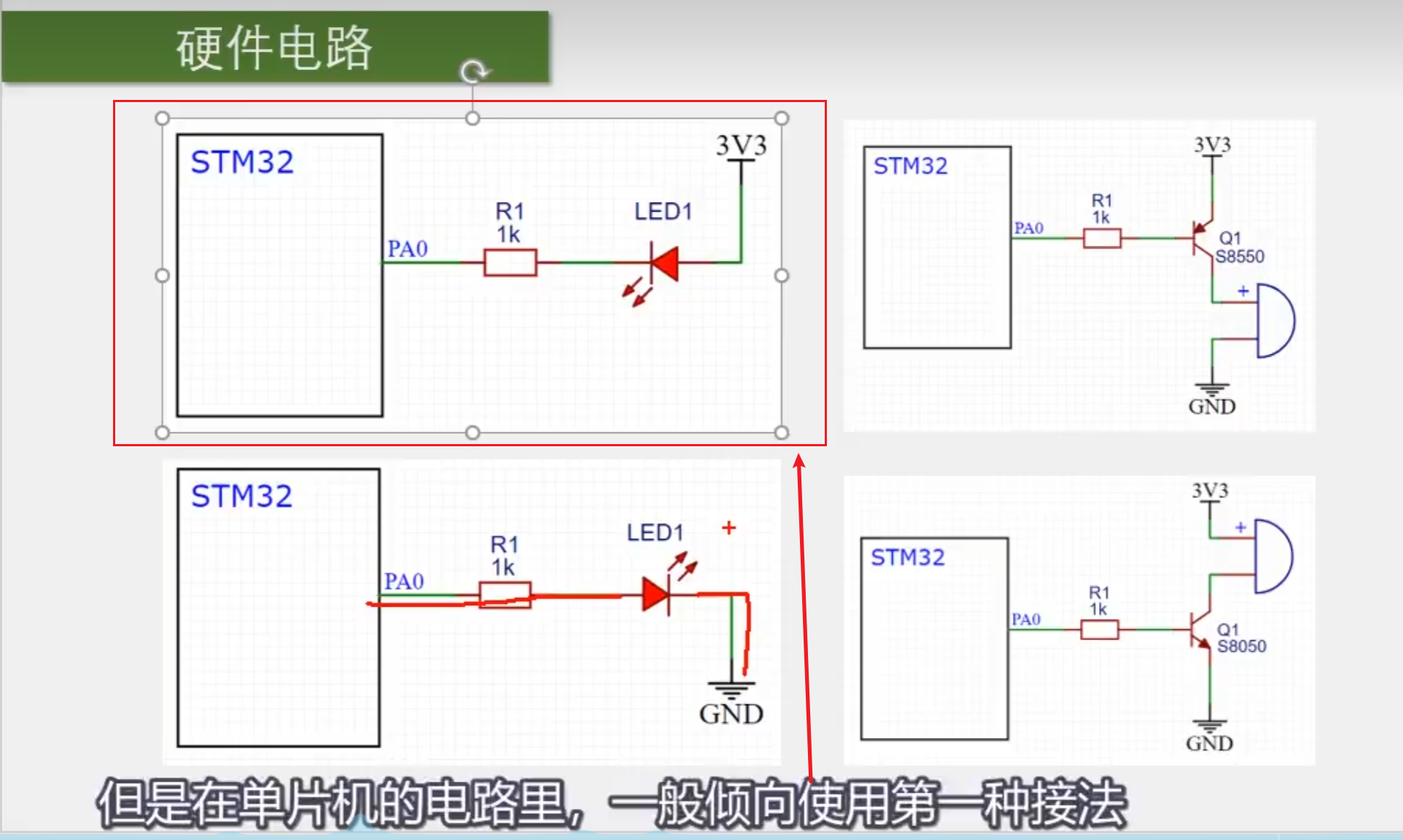
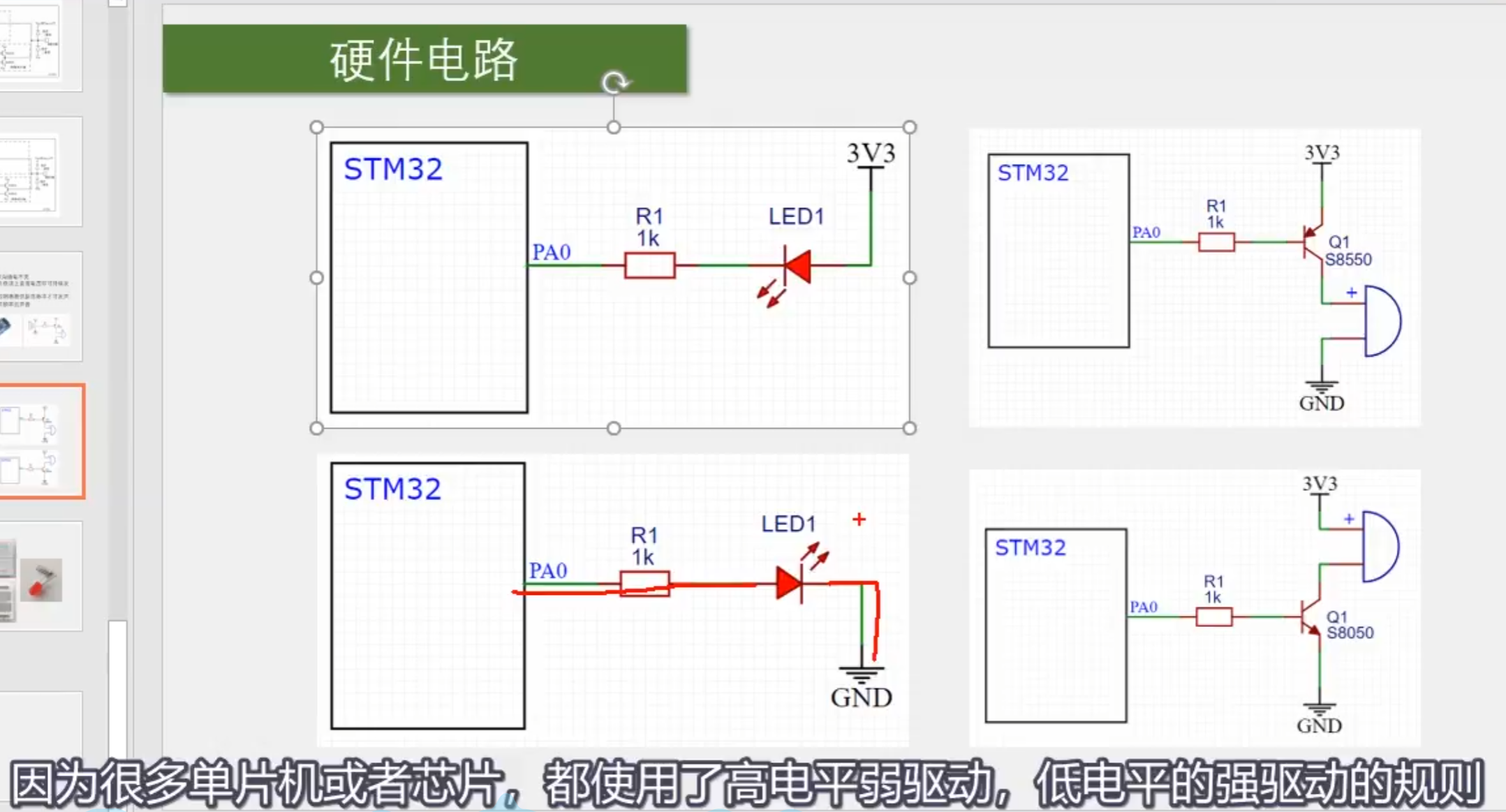
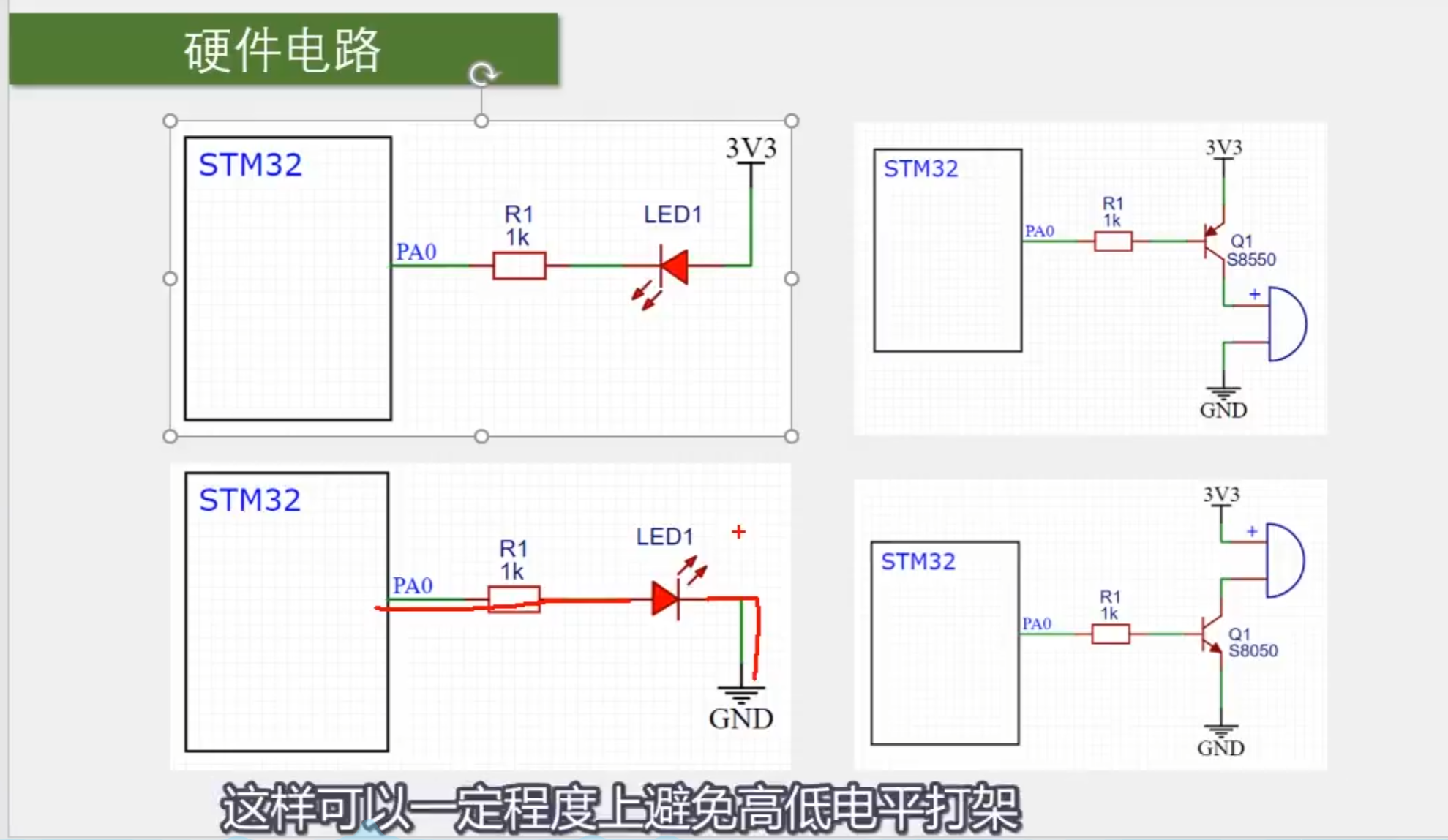
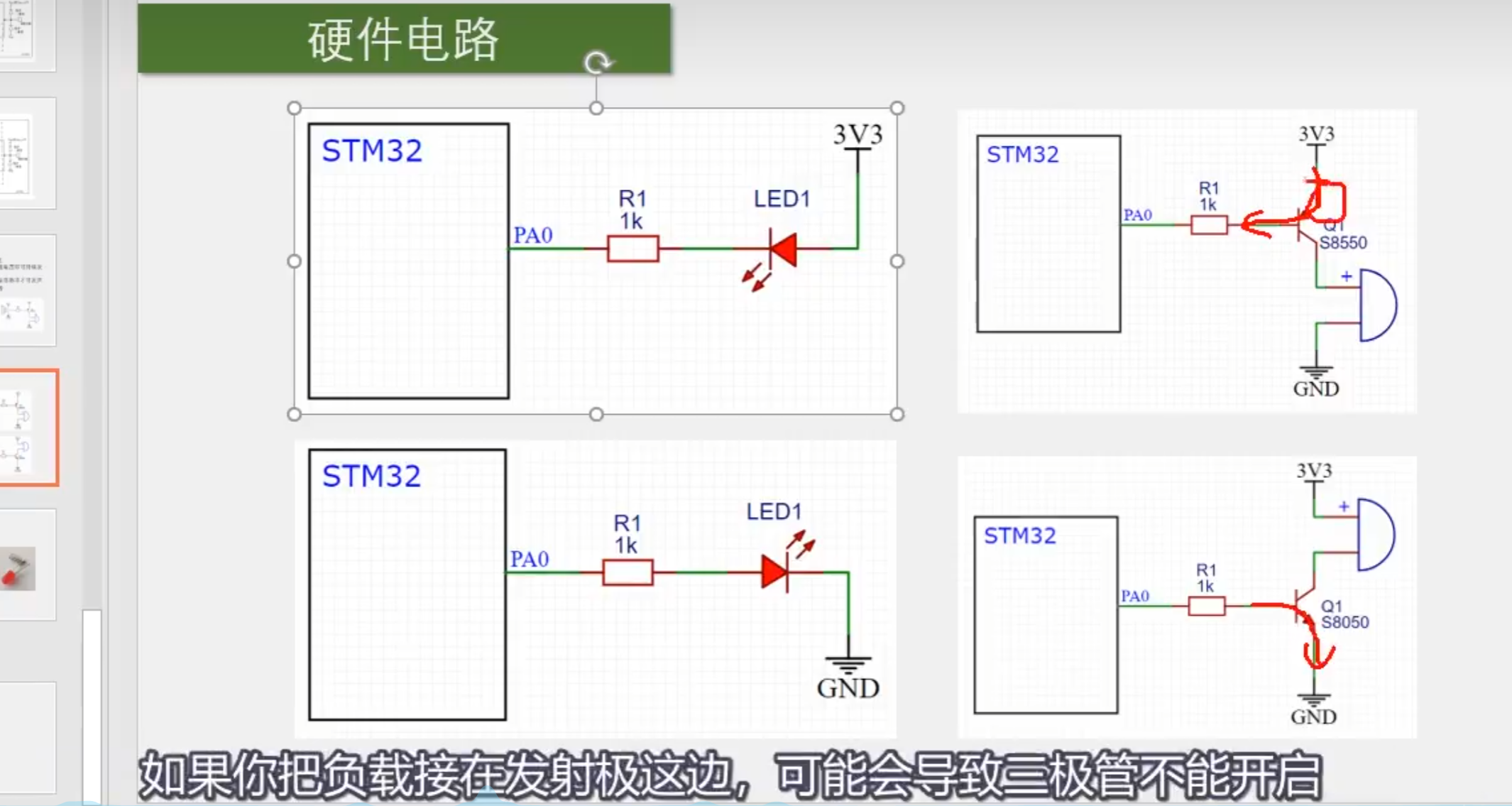
GPIO驱动LED
上面是低电平驱动;下面是高电平驱动。
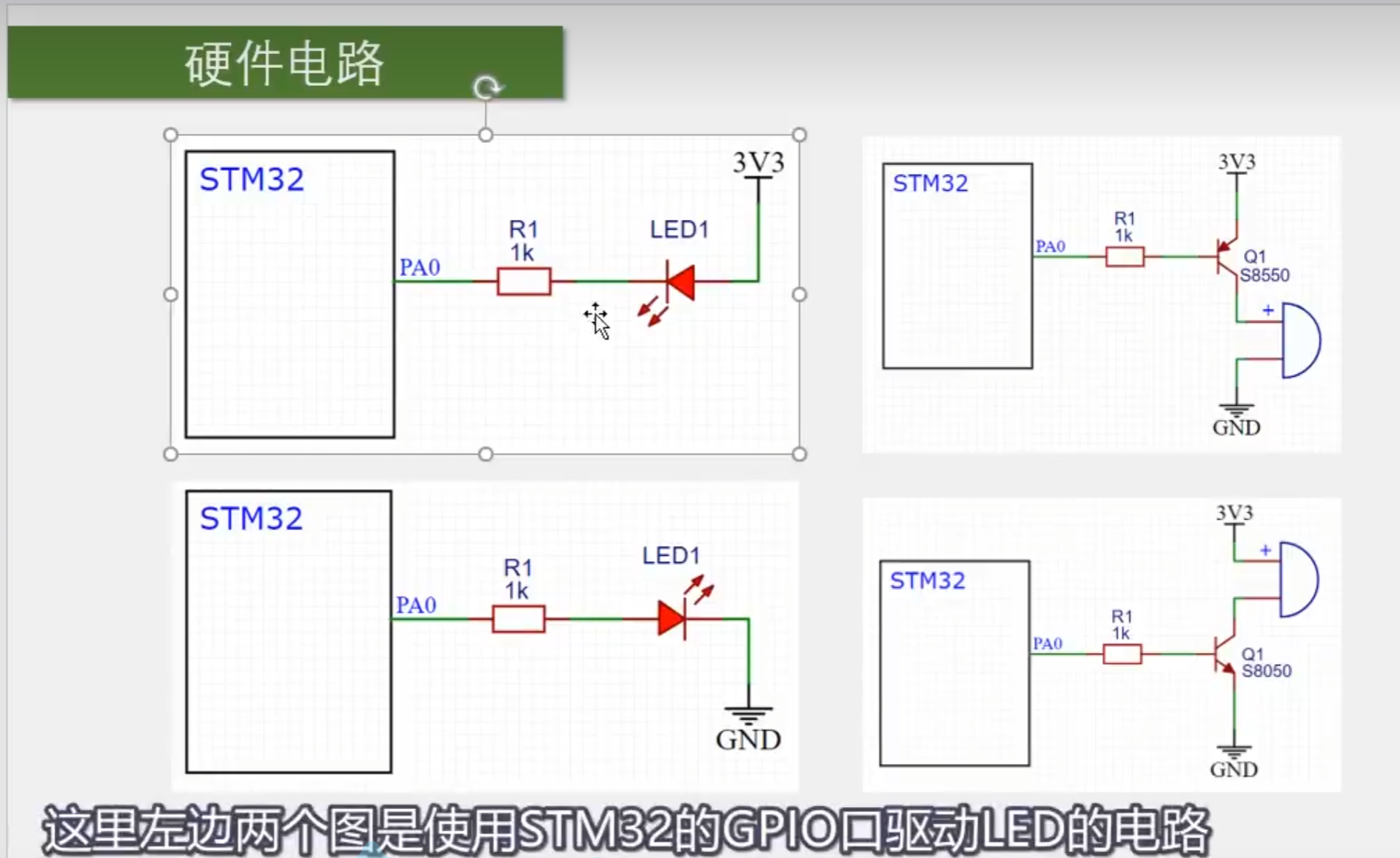
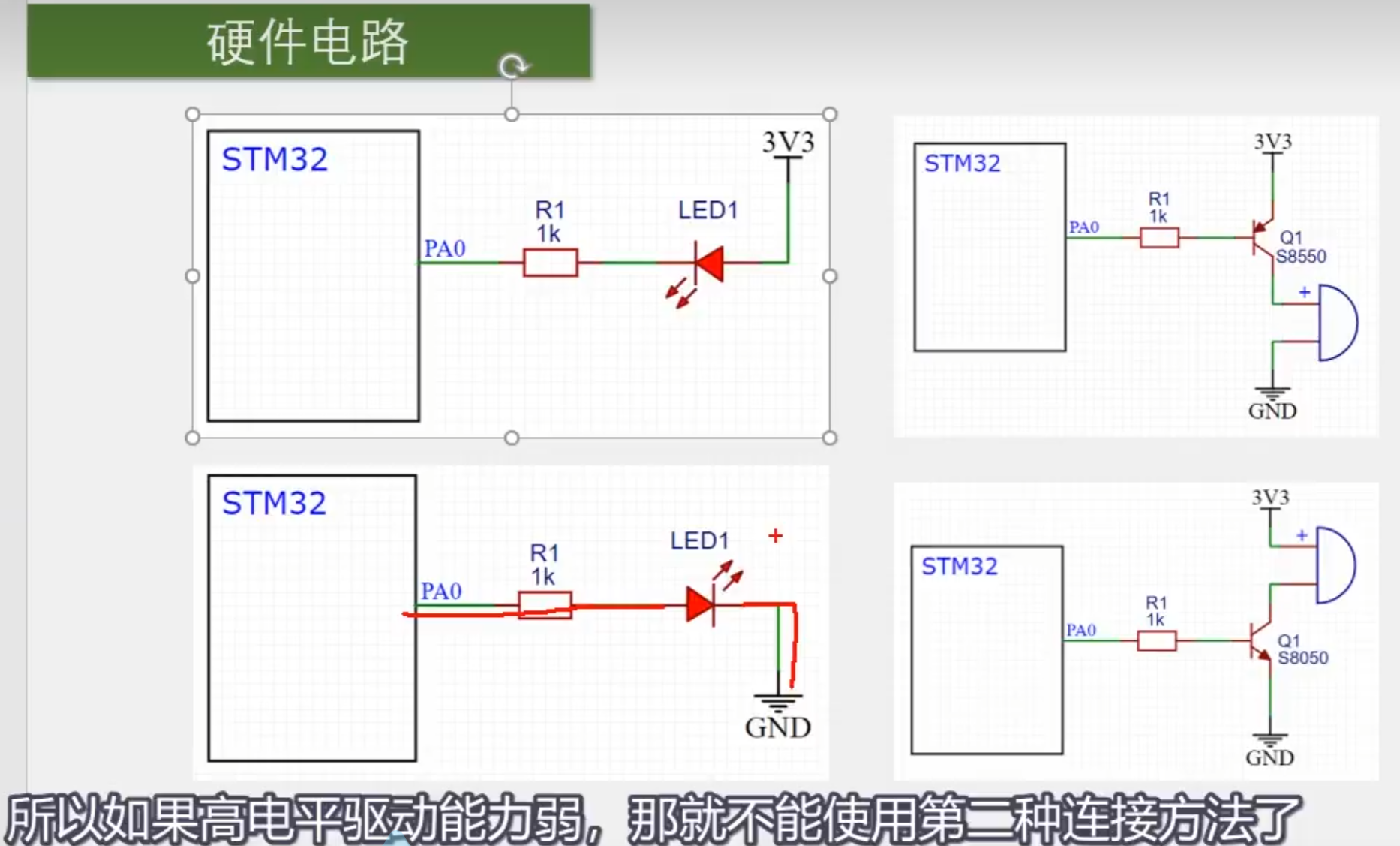
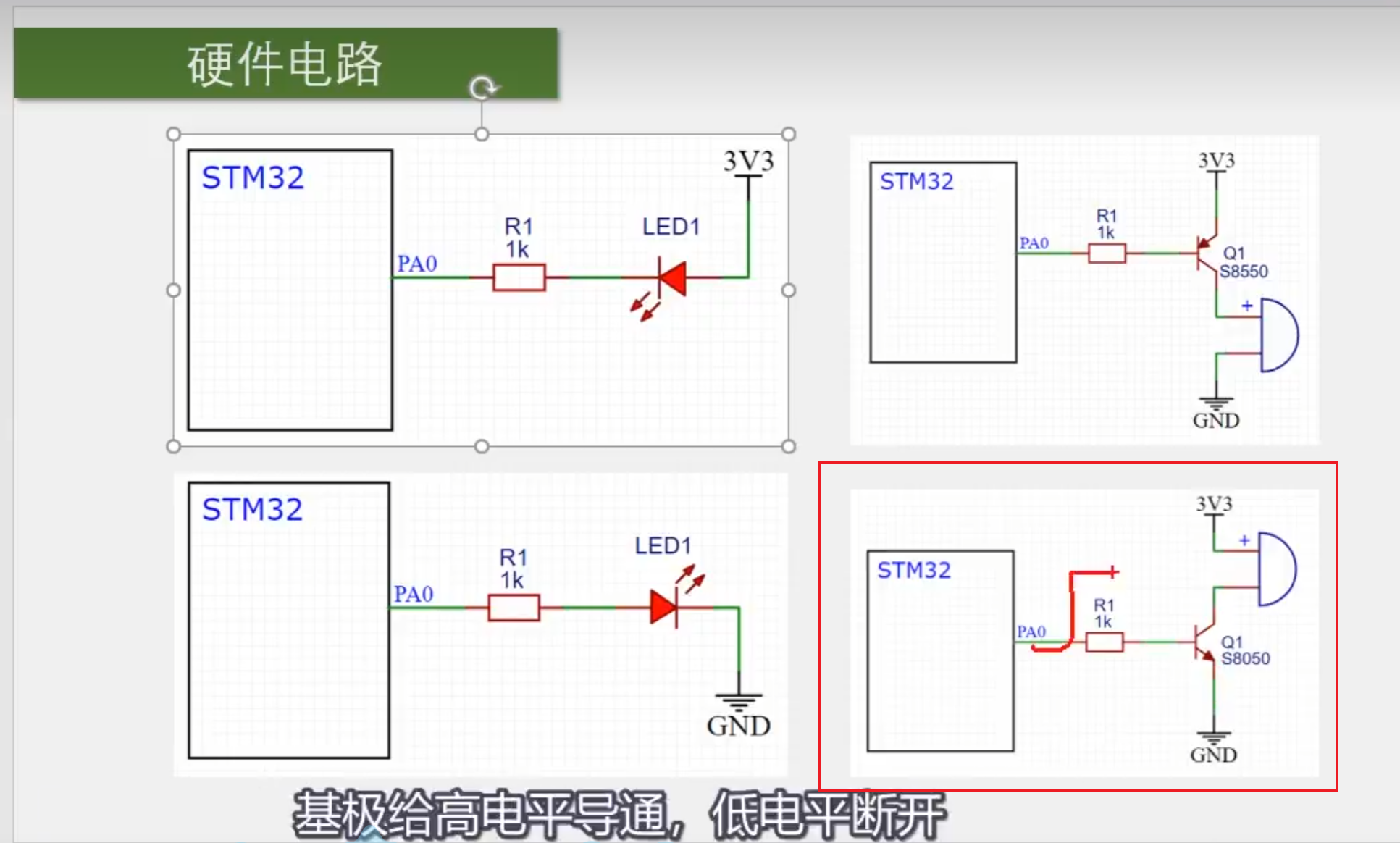
蜂鸣器电路
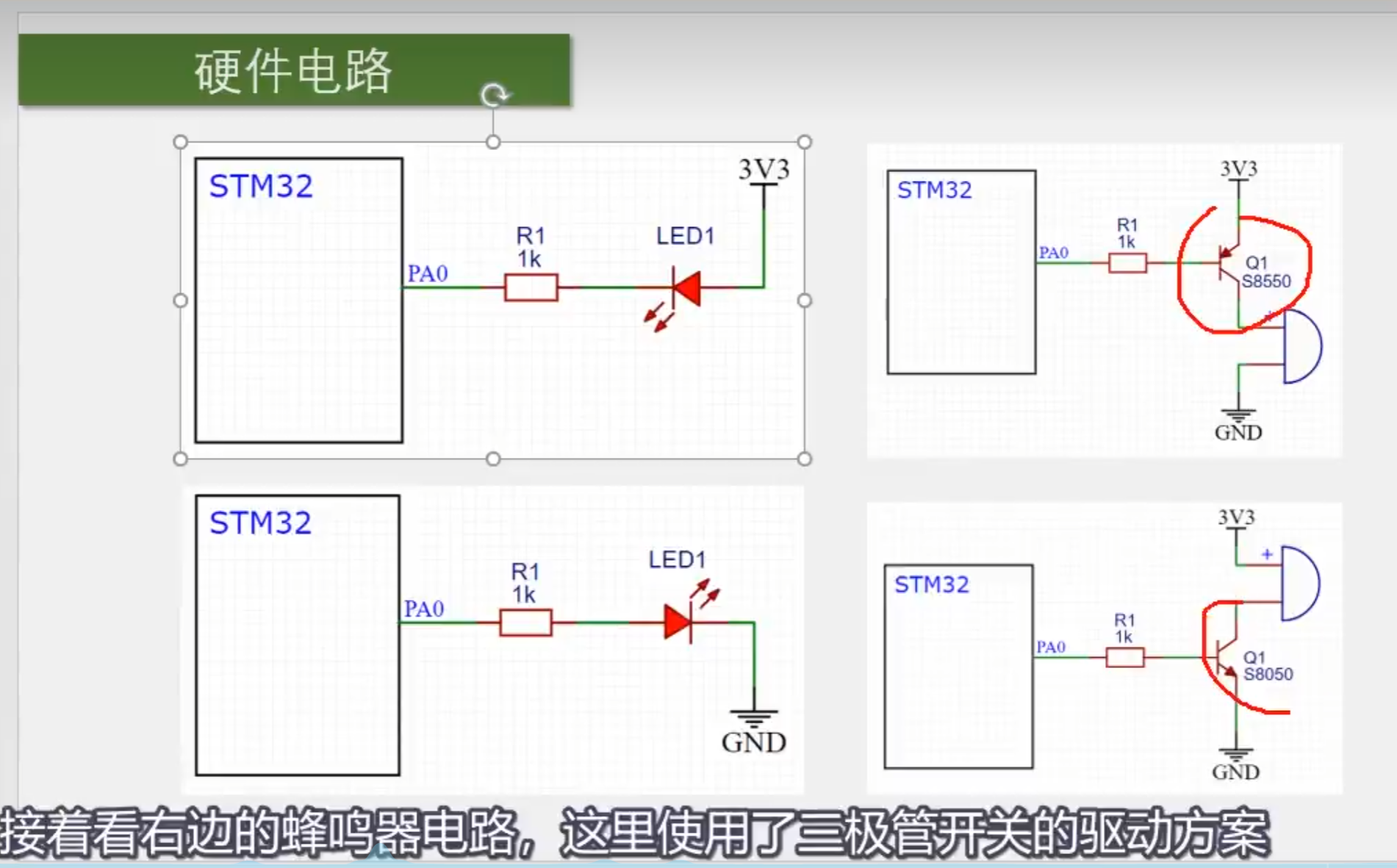
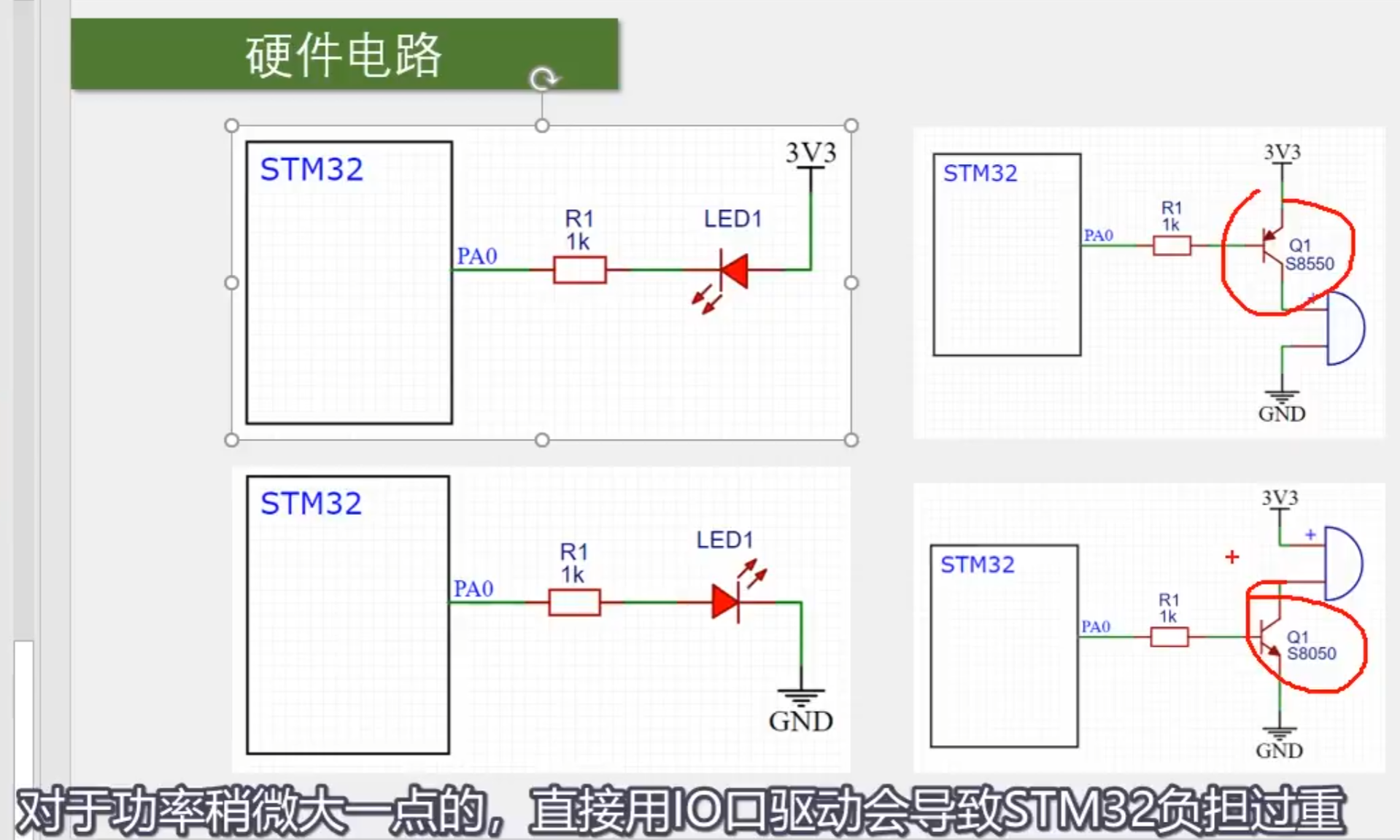
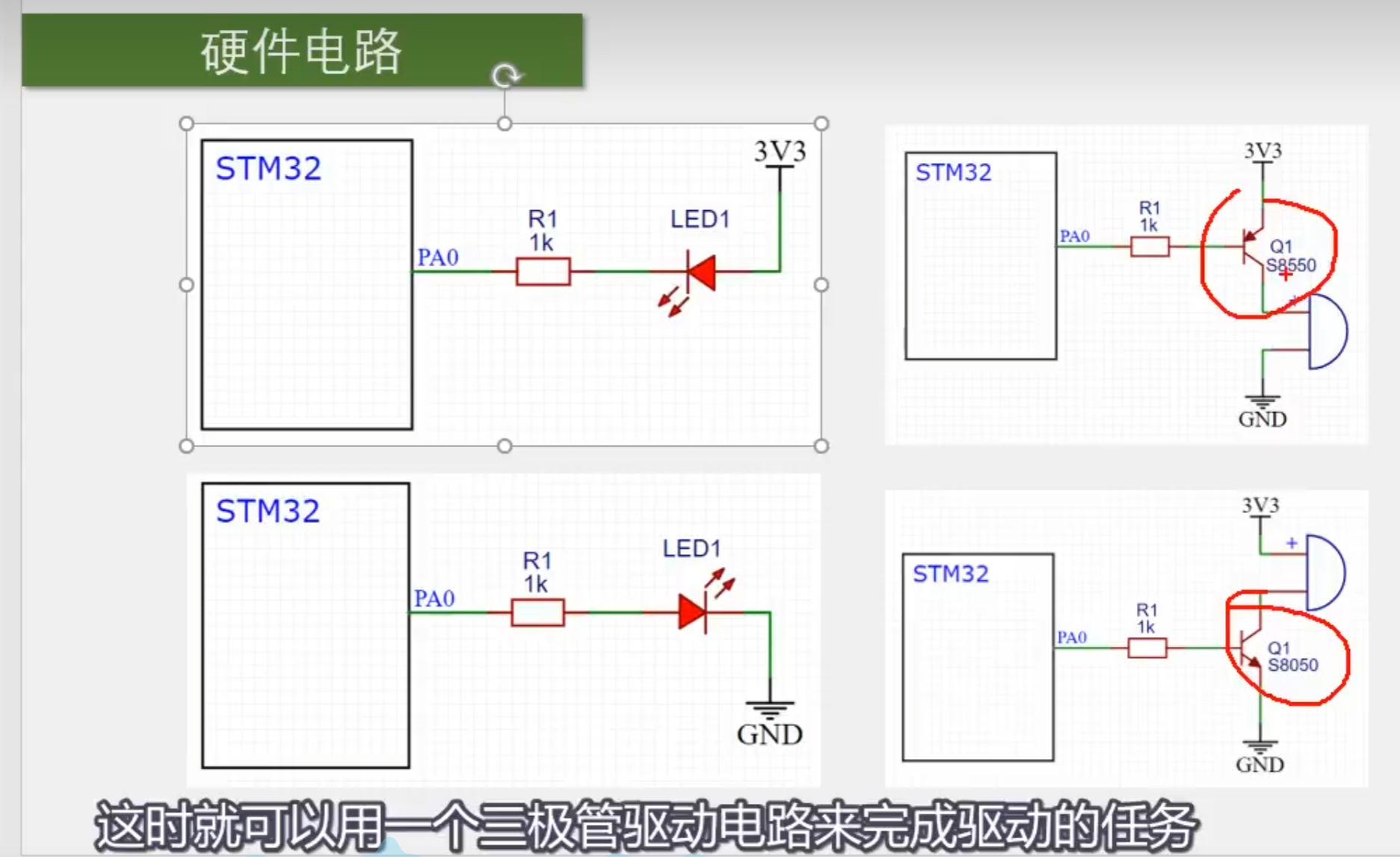
上面的给低电平,就会导通
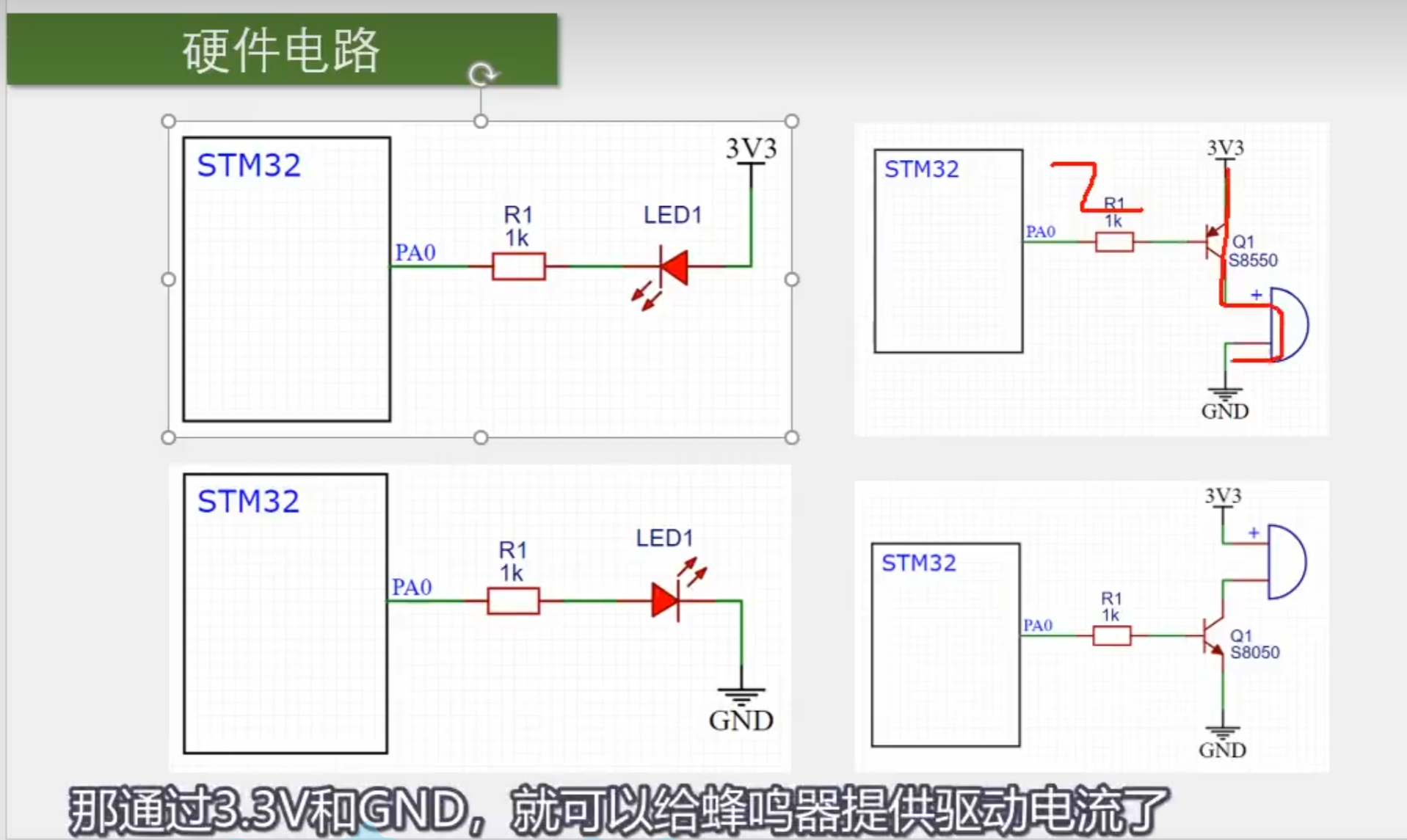
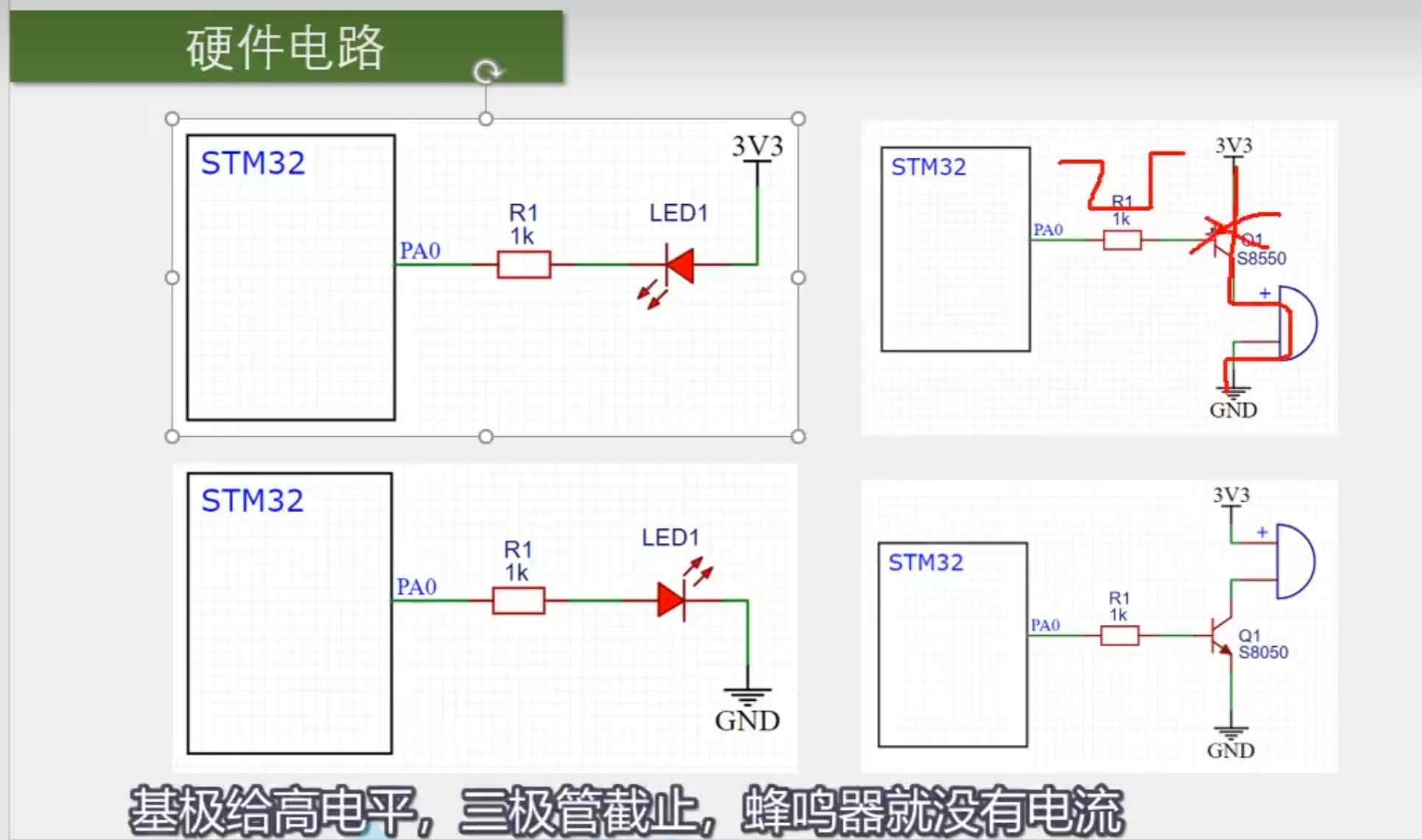
下面这个是给高电平导通,低电平断开。
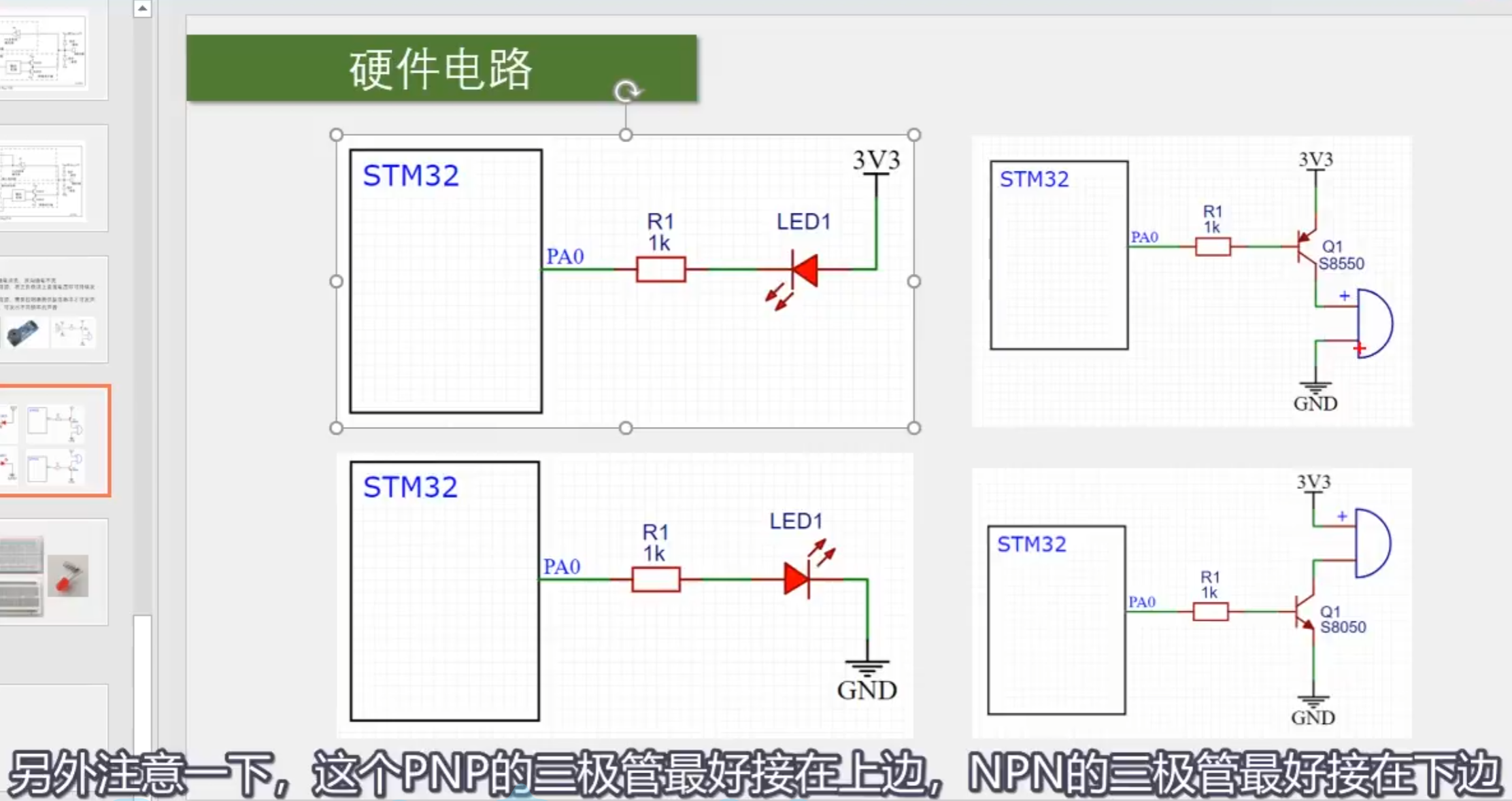
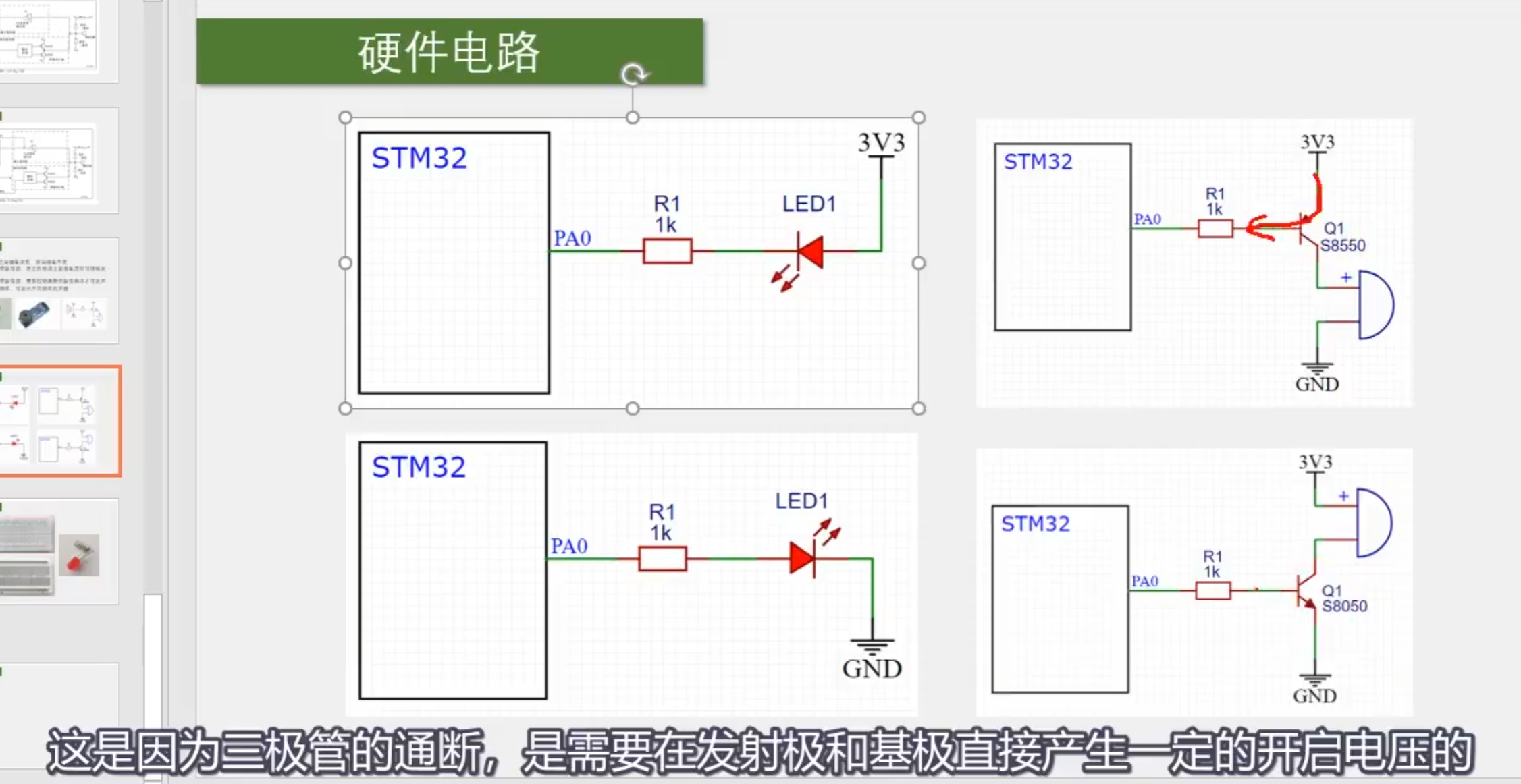
PS: 带箭头的是发射集!
函数说明
GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin) 设置为高电平
GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin) 设置为低电平
GPIO_WriteBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, BitAction BitVal)
BitAction BitVal: 根据第三个参数的值设置指定的端口
* @param BitVal: specifies the value to be written to the selected bit. * This parameter can be one of the BitAction enum values: * @arg Bit_RESET: to clear the port pin : 0 * @arg Bit_SET: to set the port pin : 1GPIO_Write(GPIO_TypeDef* GPIOx, uint16_t PortVal) 可以对十六个端口写入
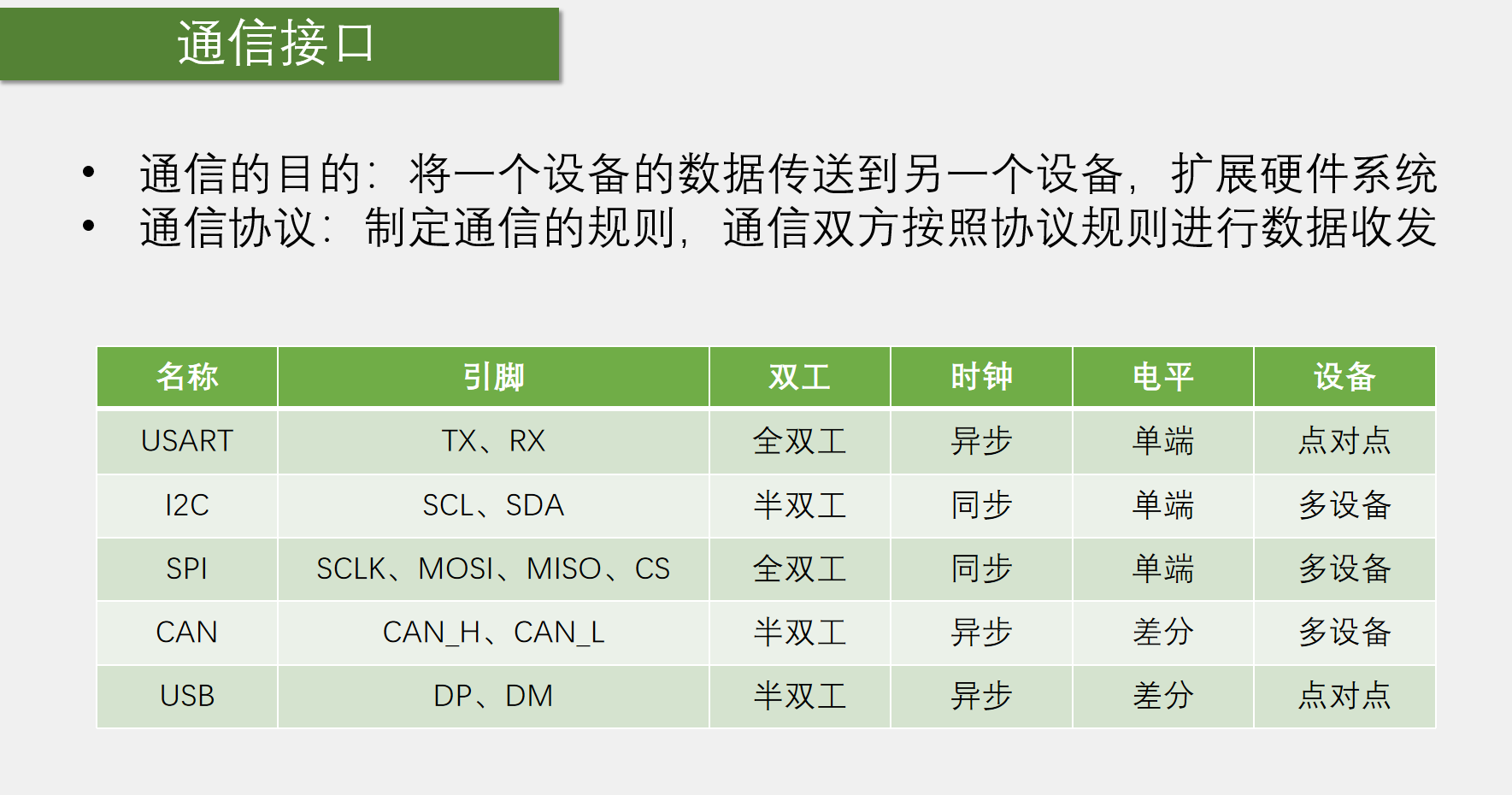
通信接口
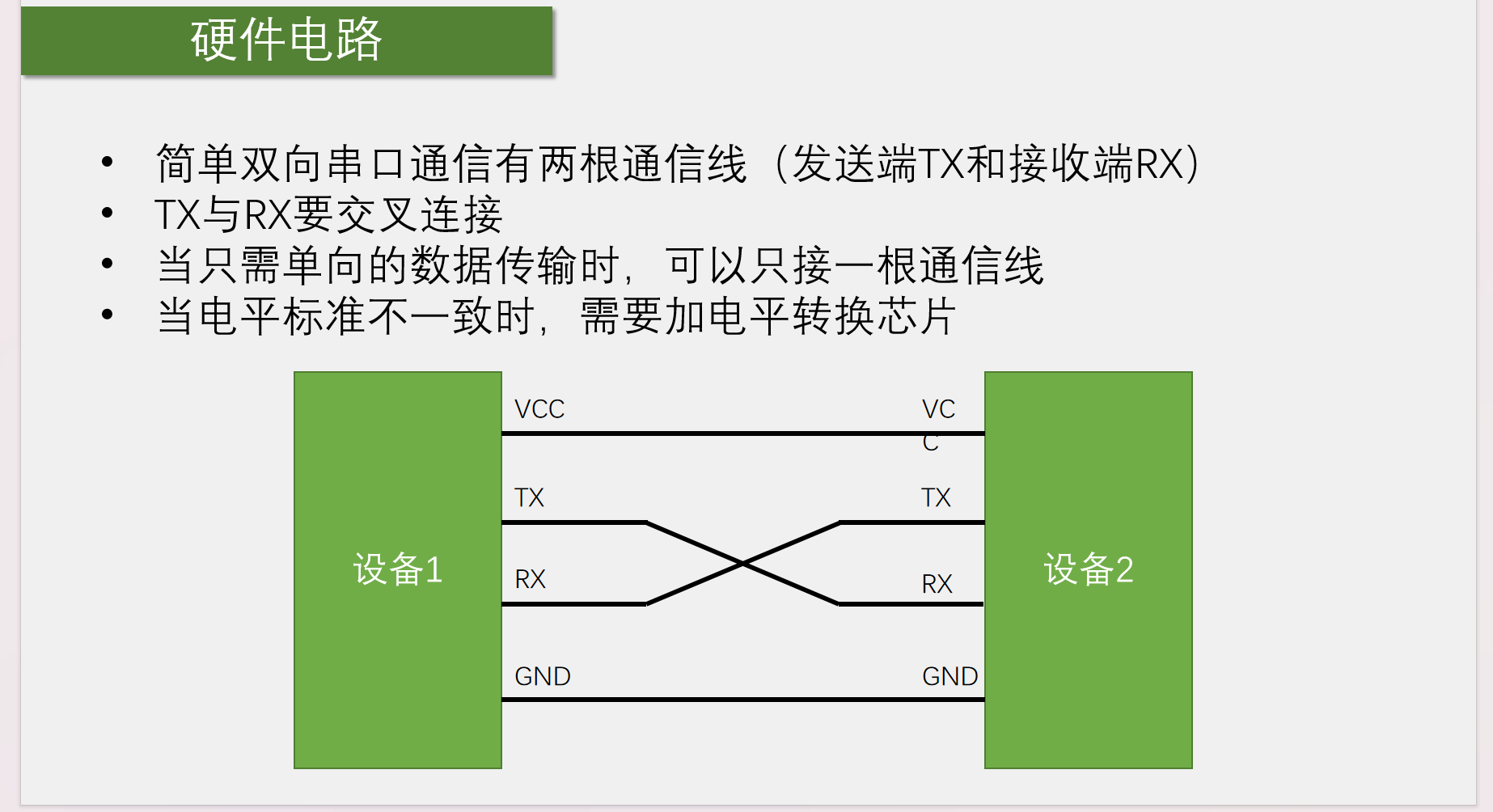
串口通信
简介

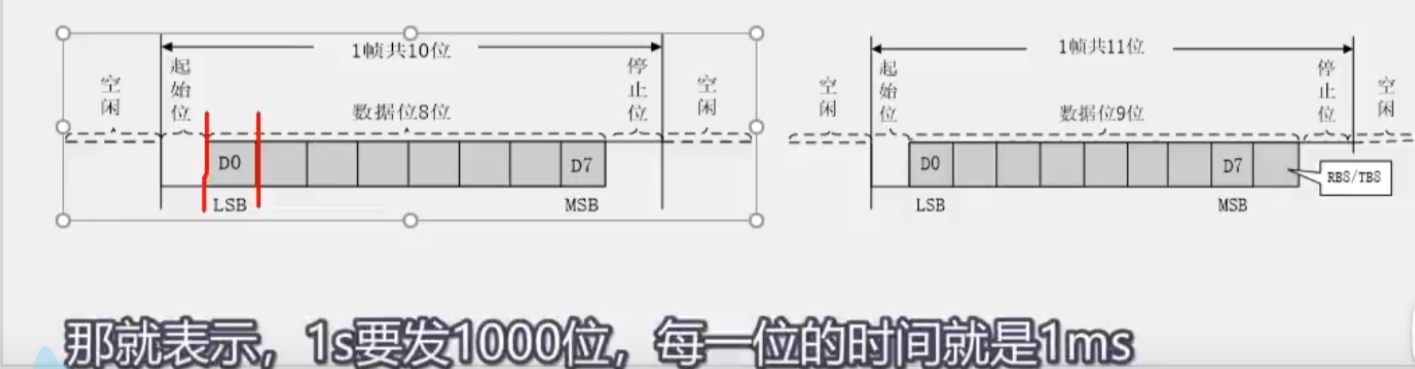
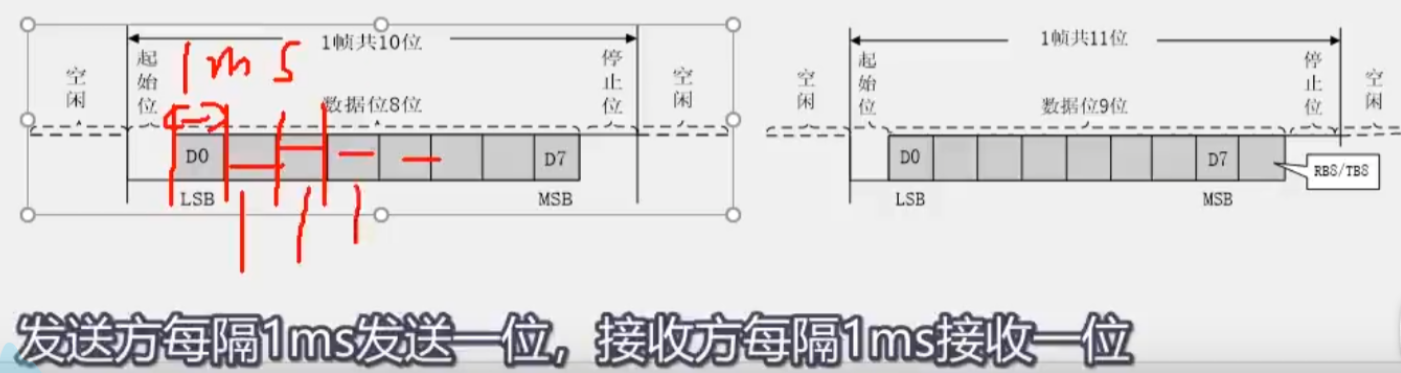
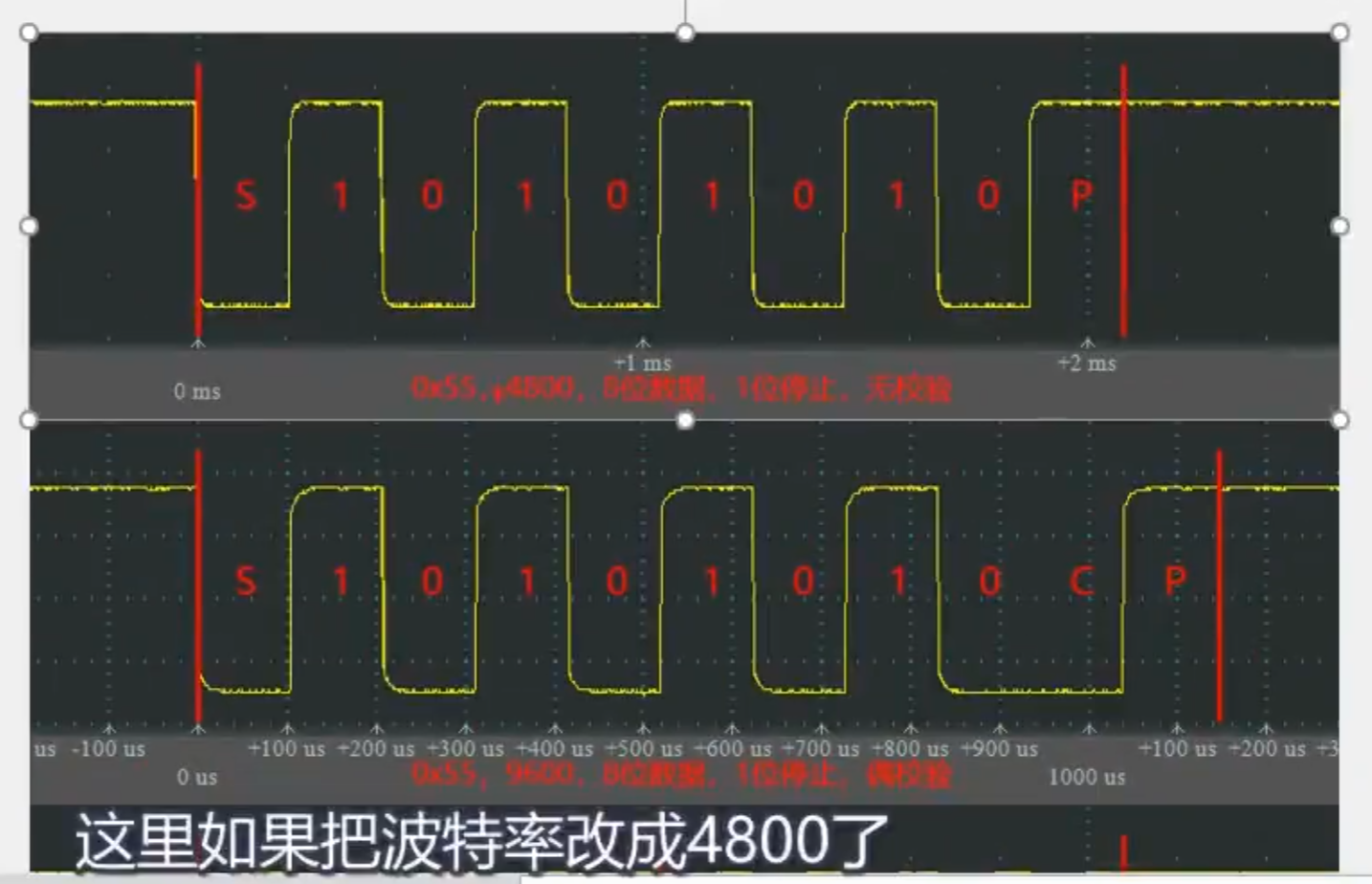
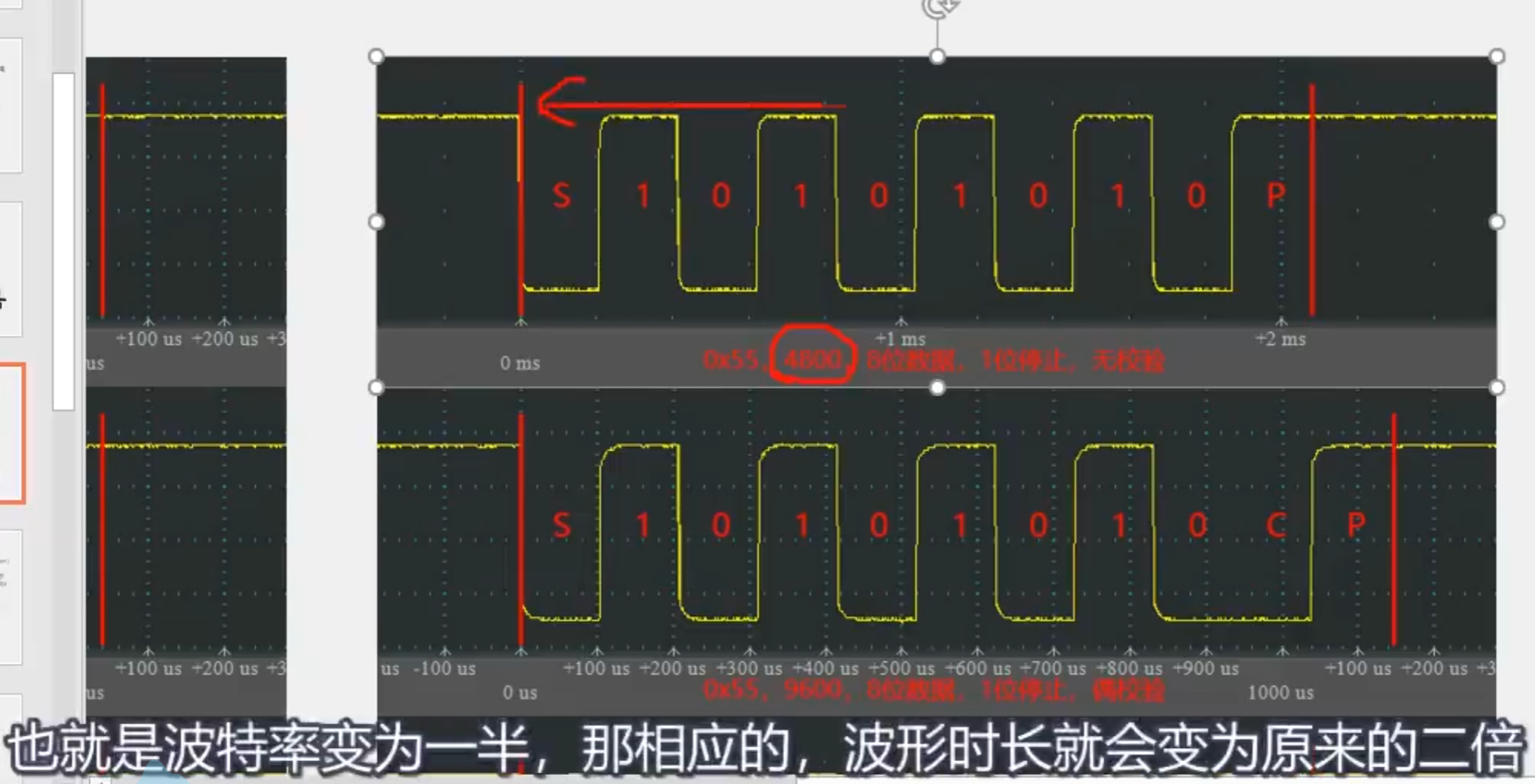
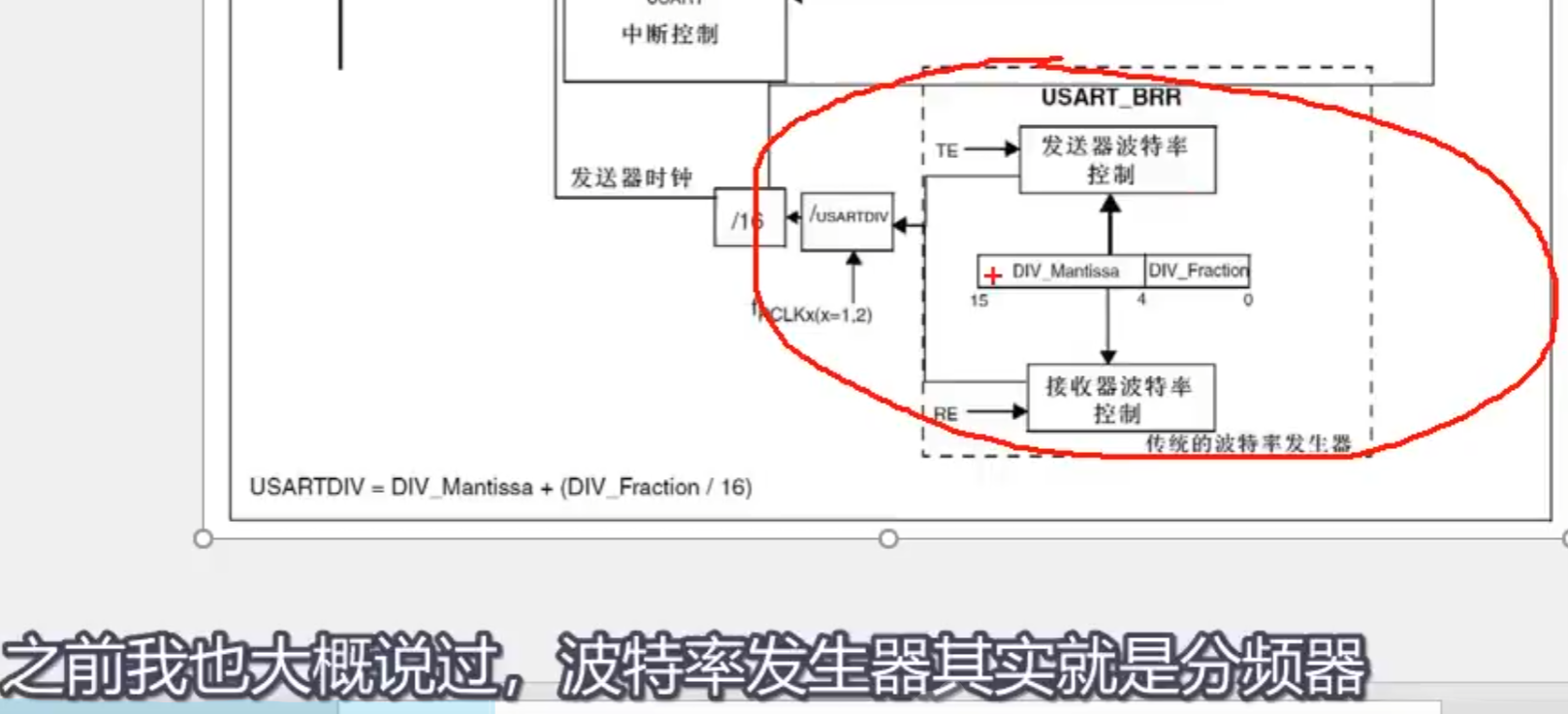
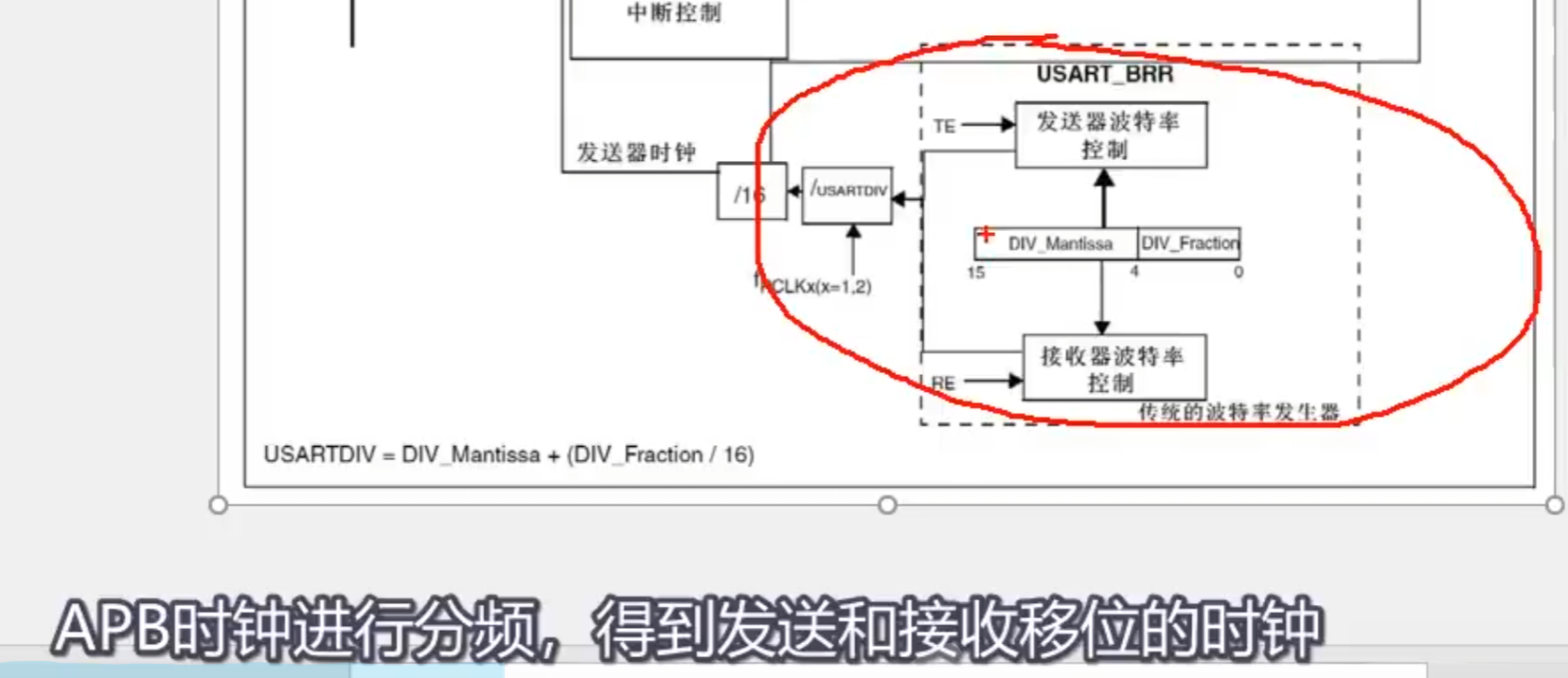
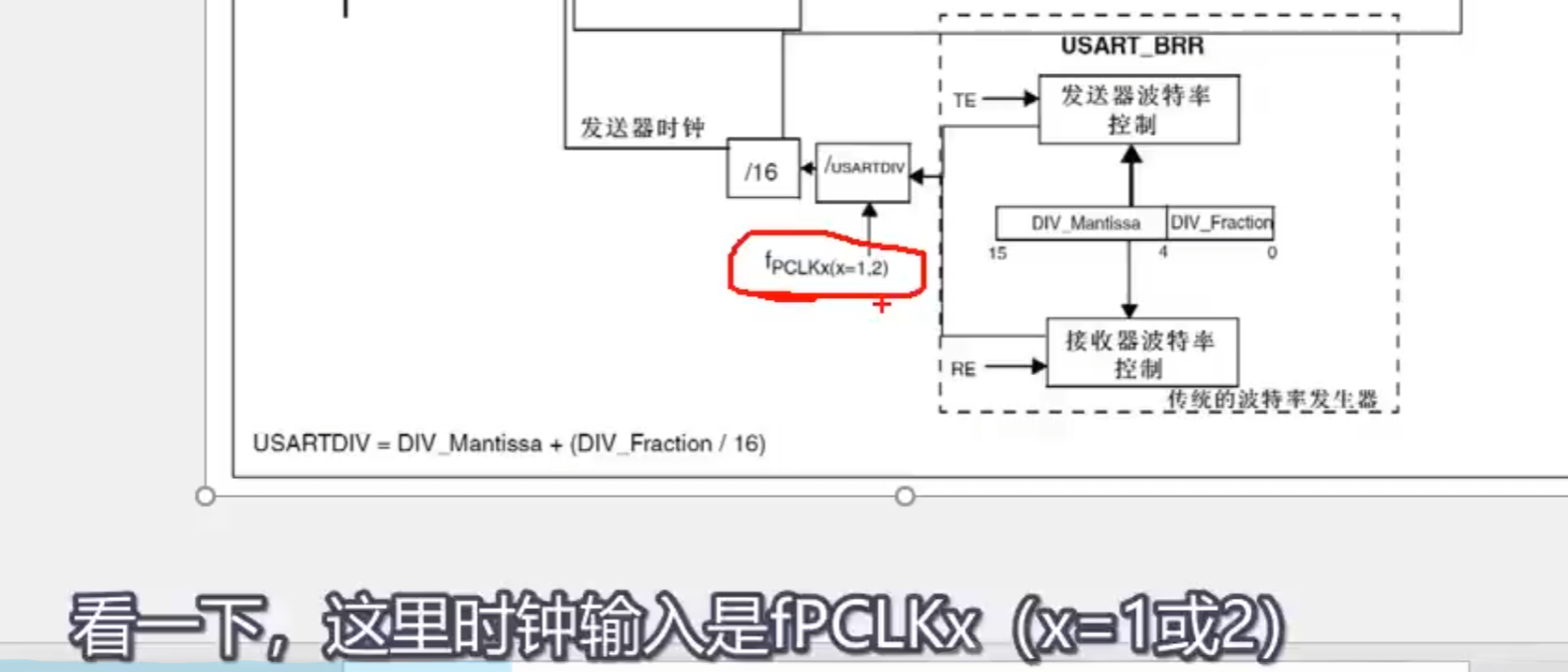
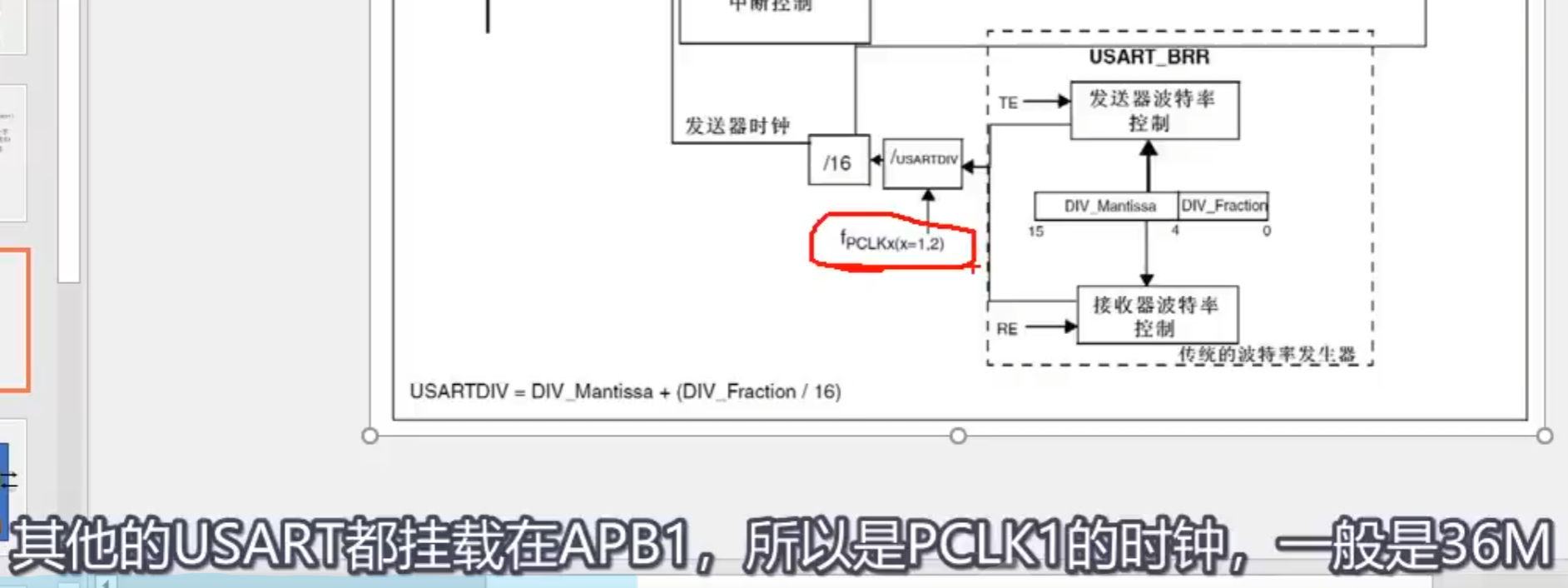
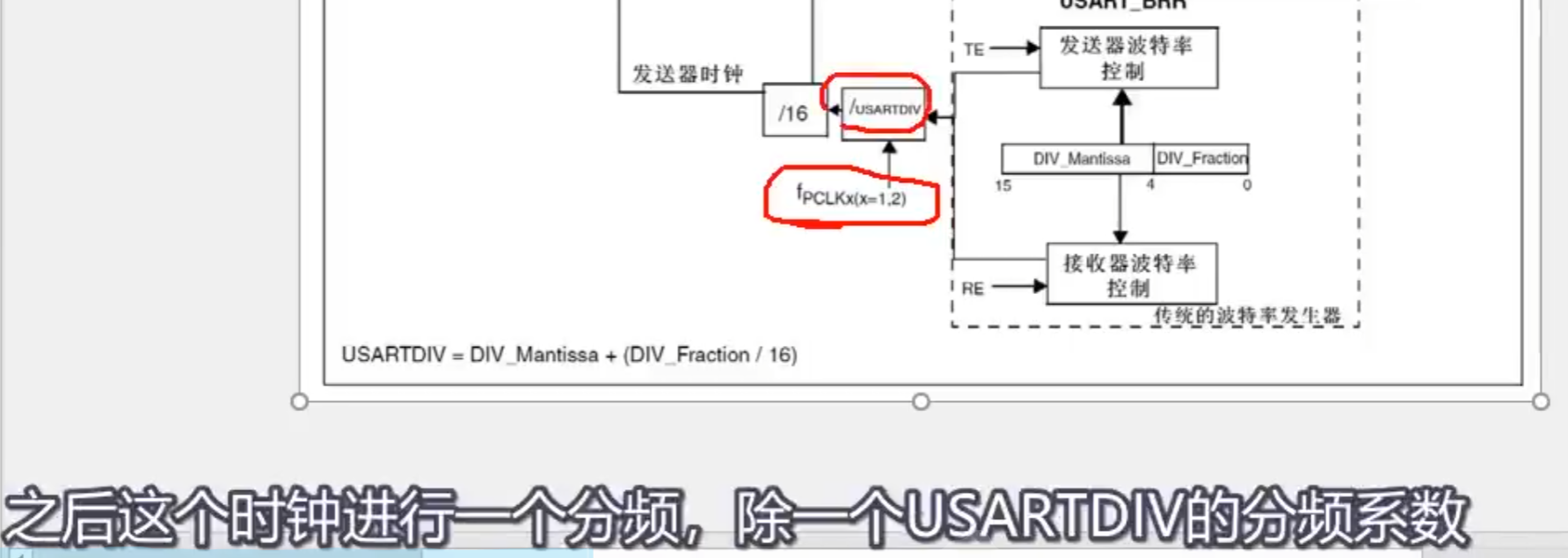
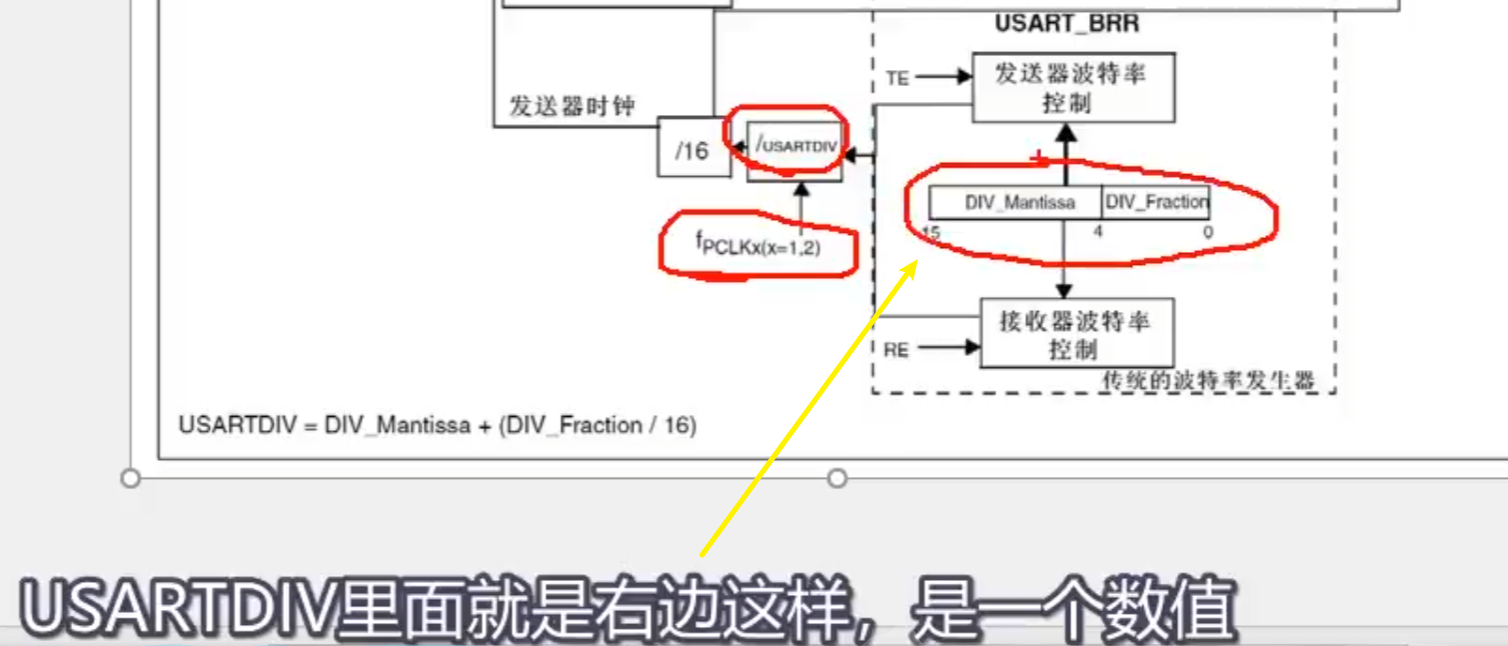
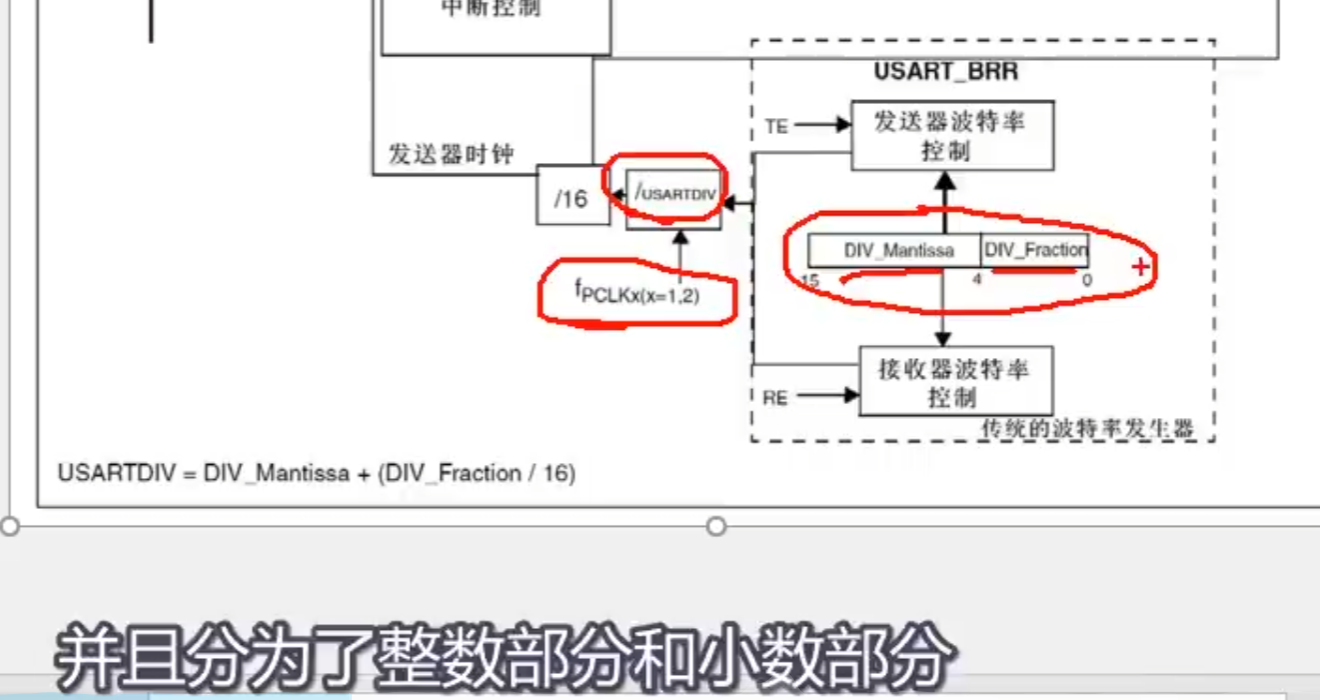
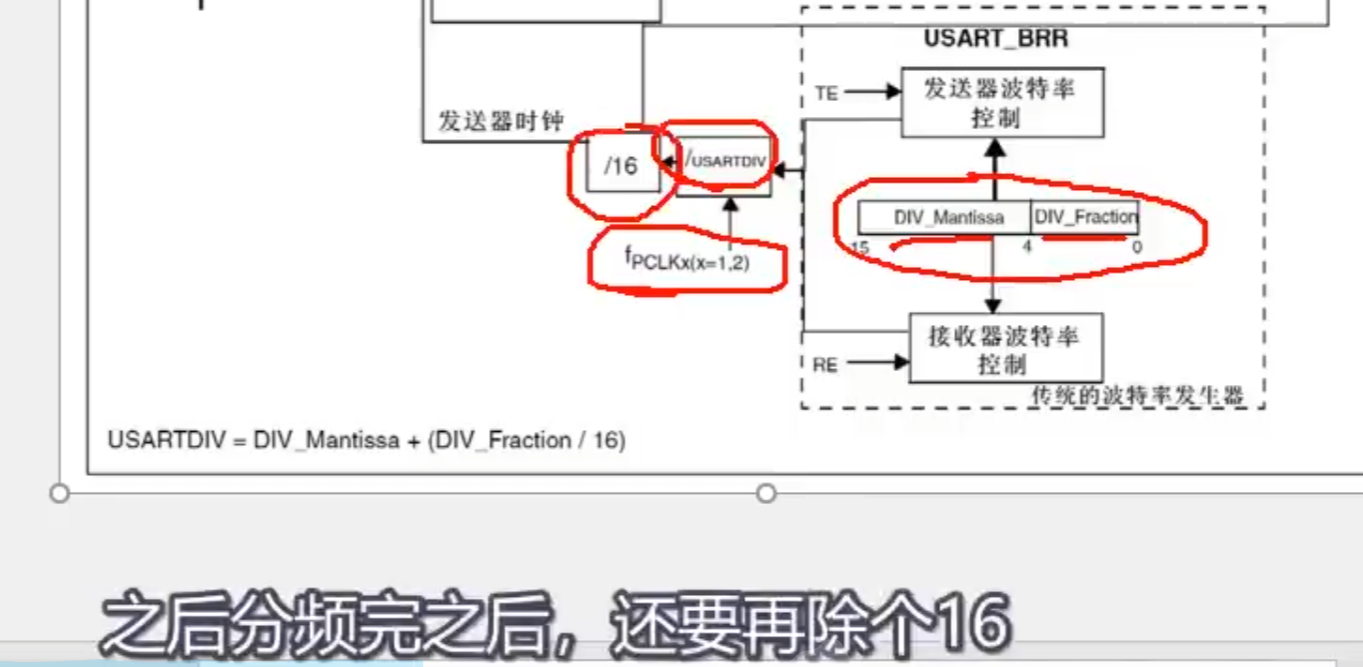
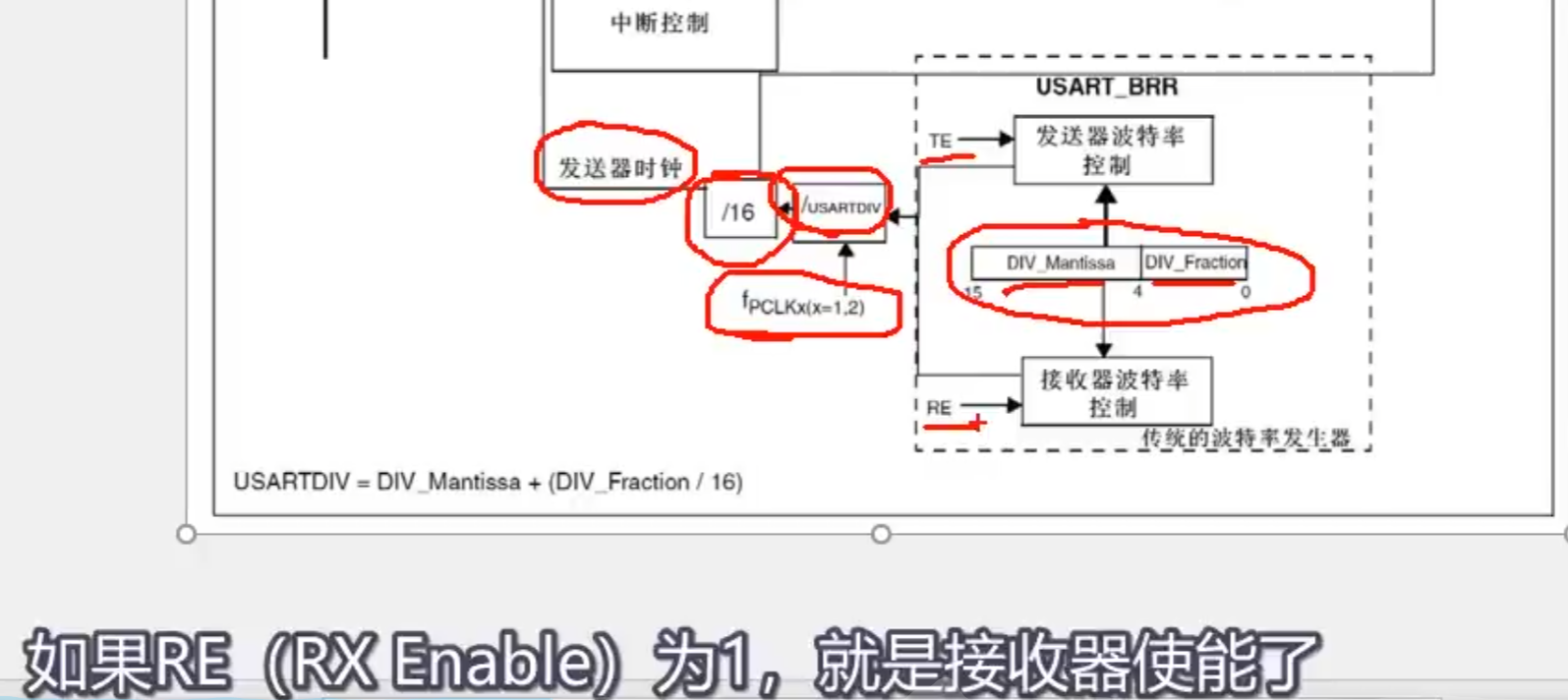
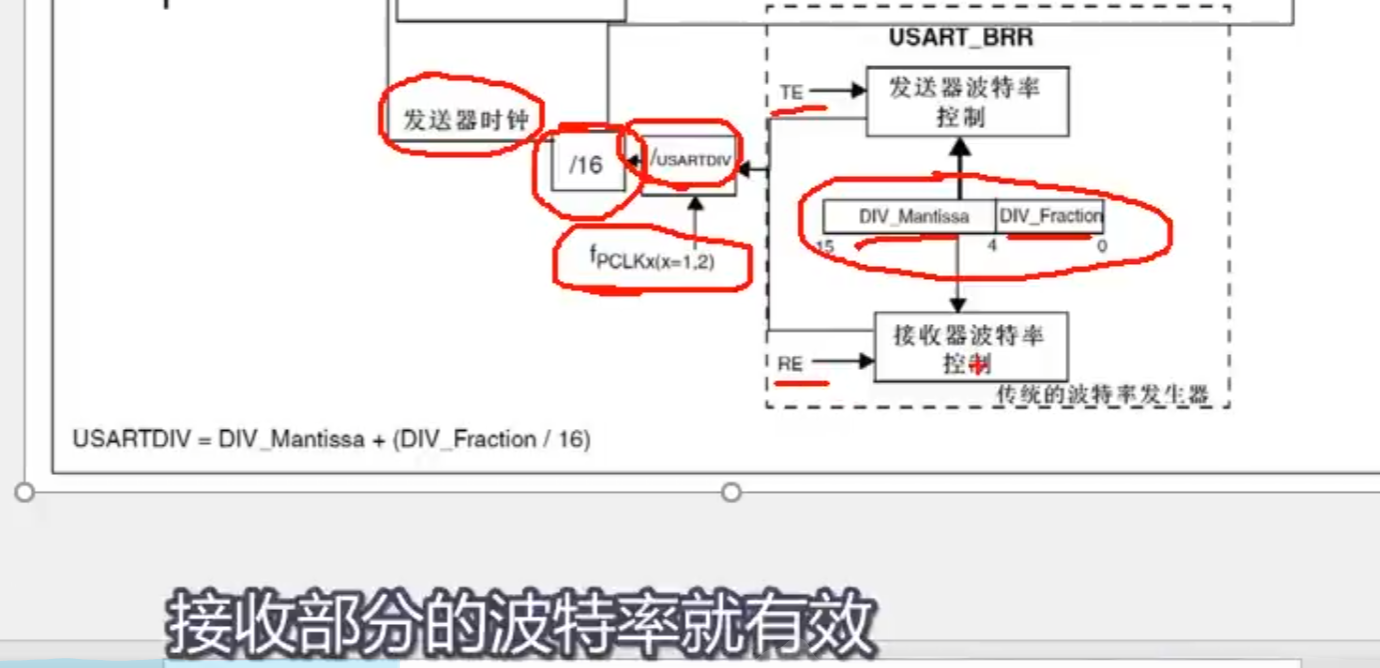
波特率
串口通信的速率
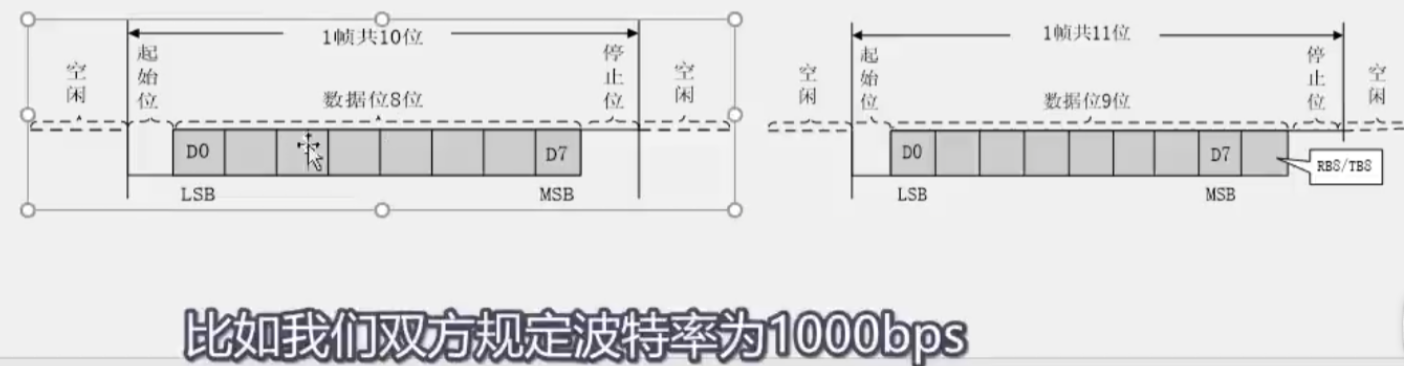
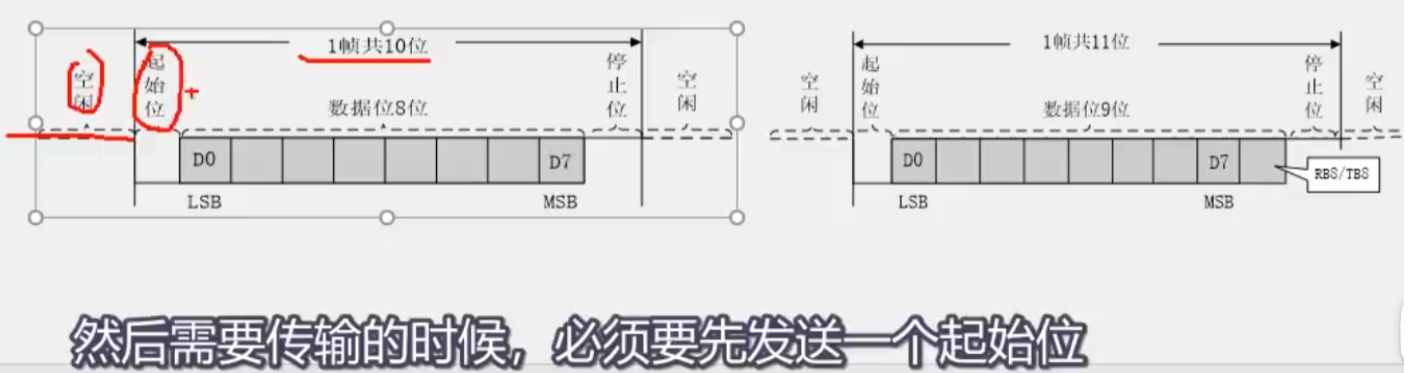
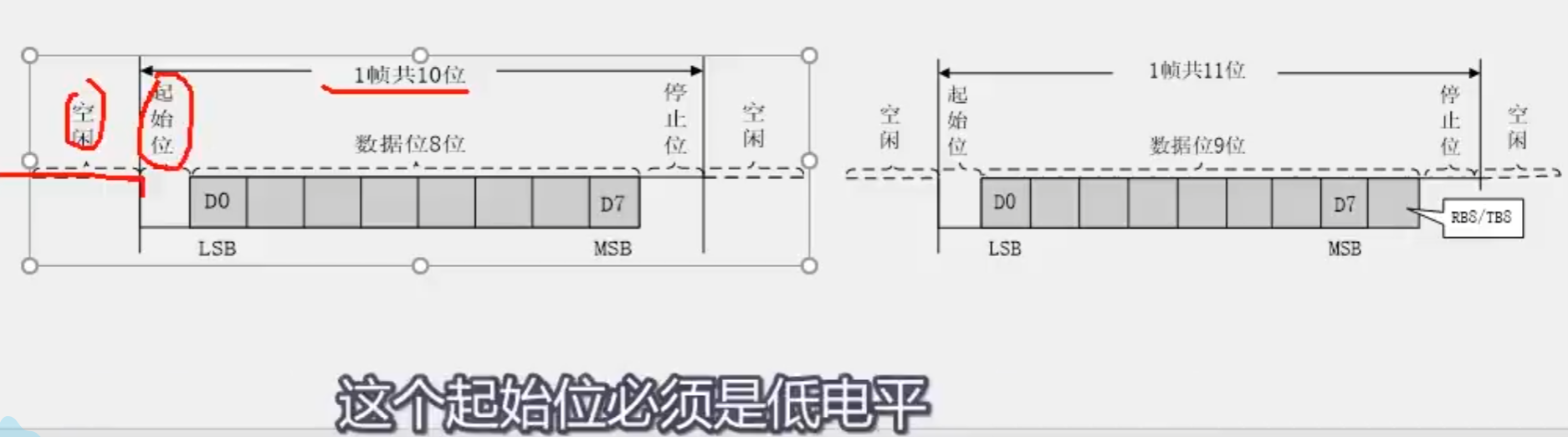
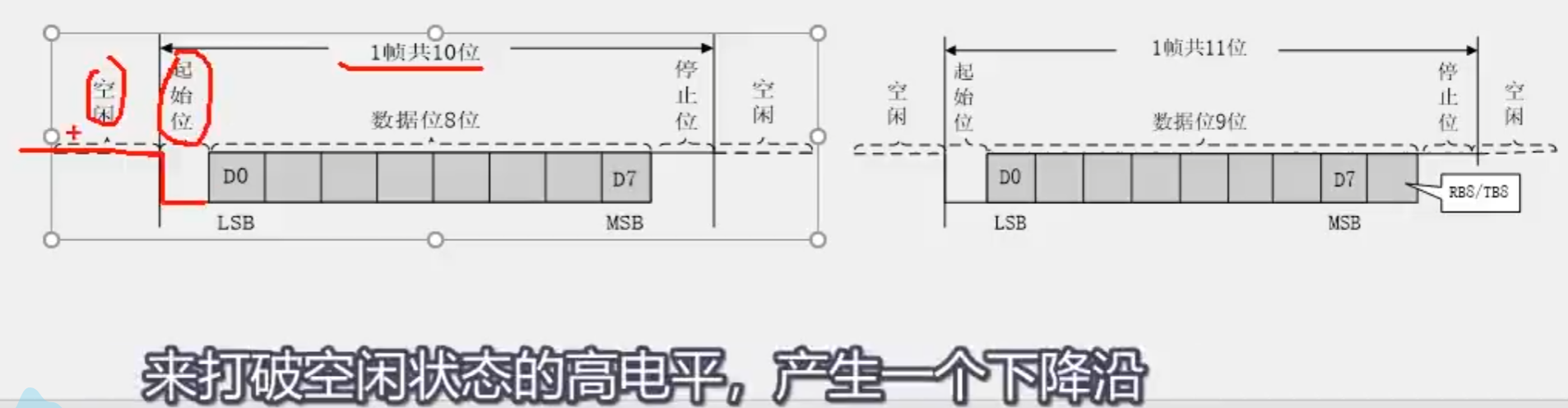
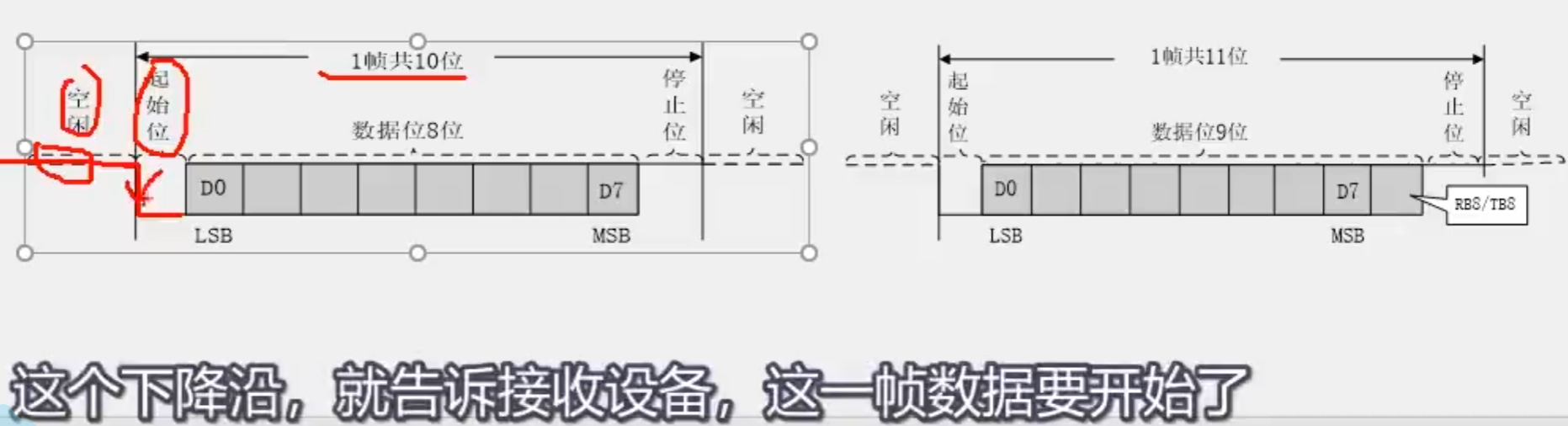
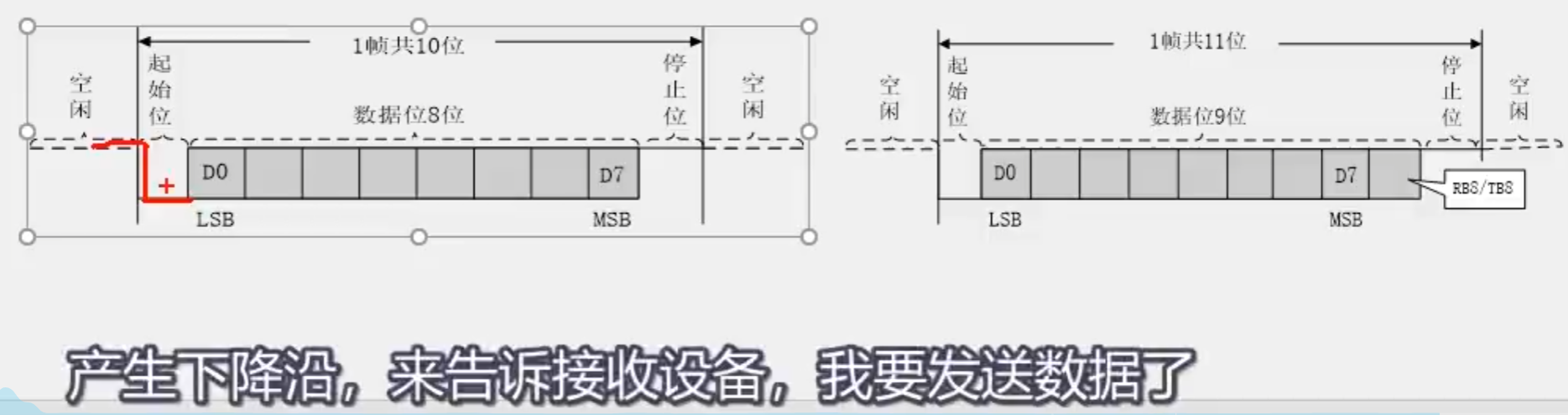
起始位
标志一个数据帧的开始,固定为低电平
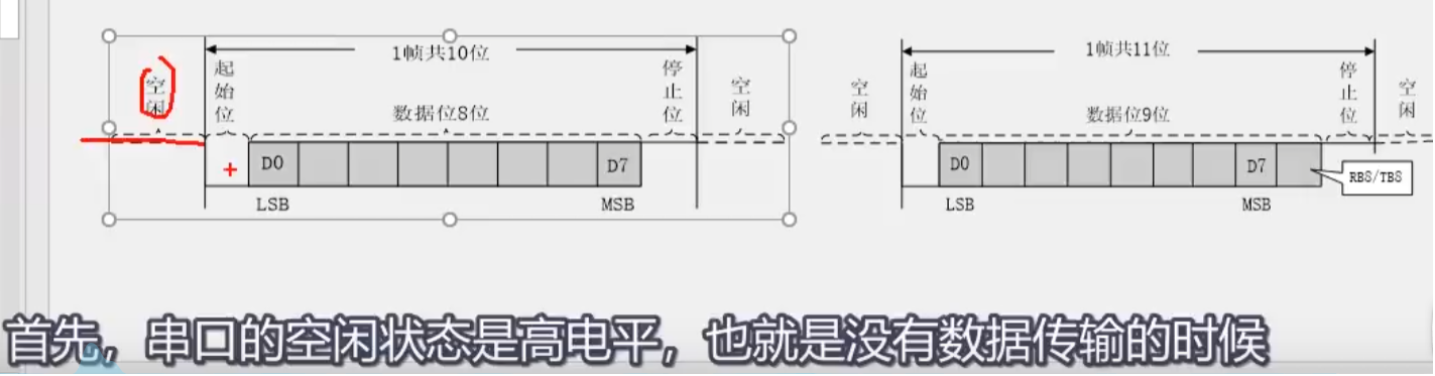
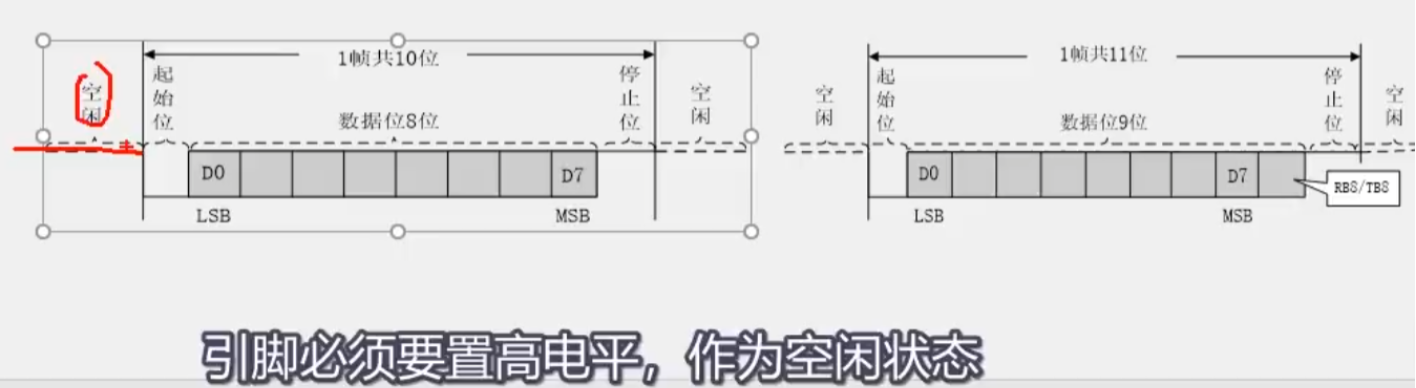
停止位
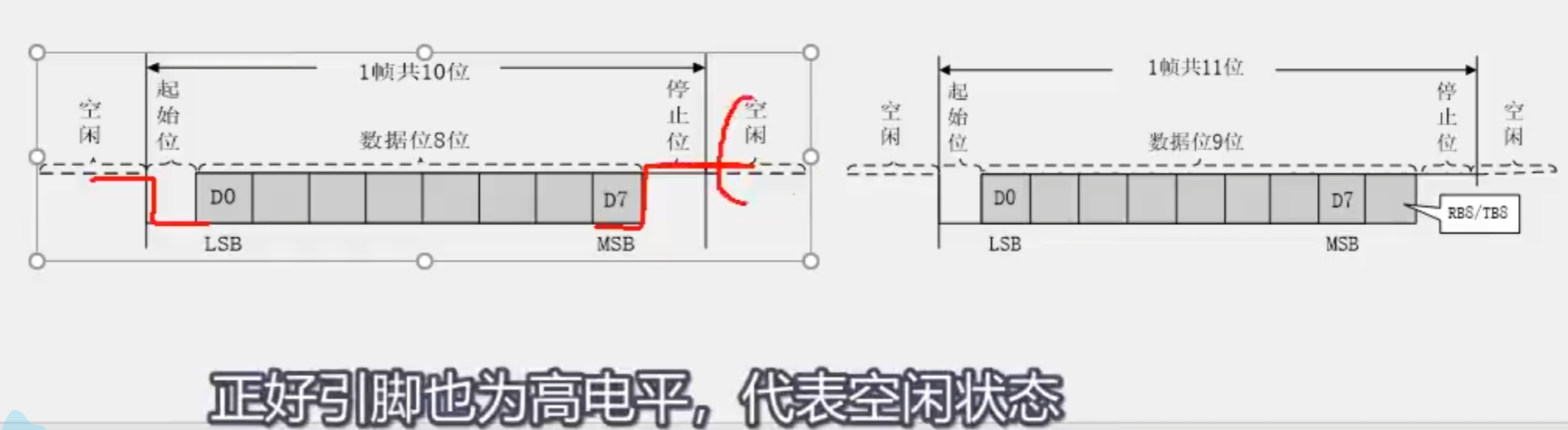
用于数据帧间隔,固定位高电平
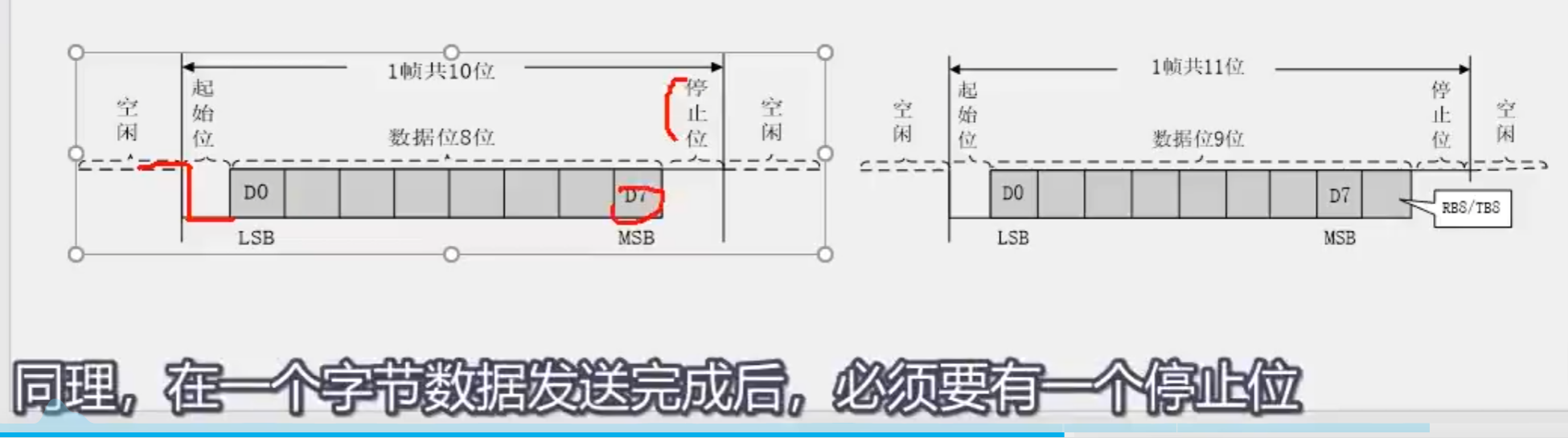
停止位
用于数据帧间隔,固定为高电平
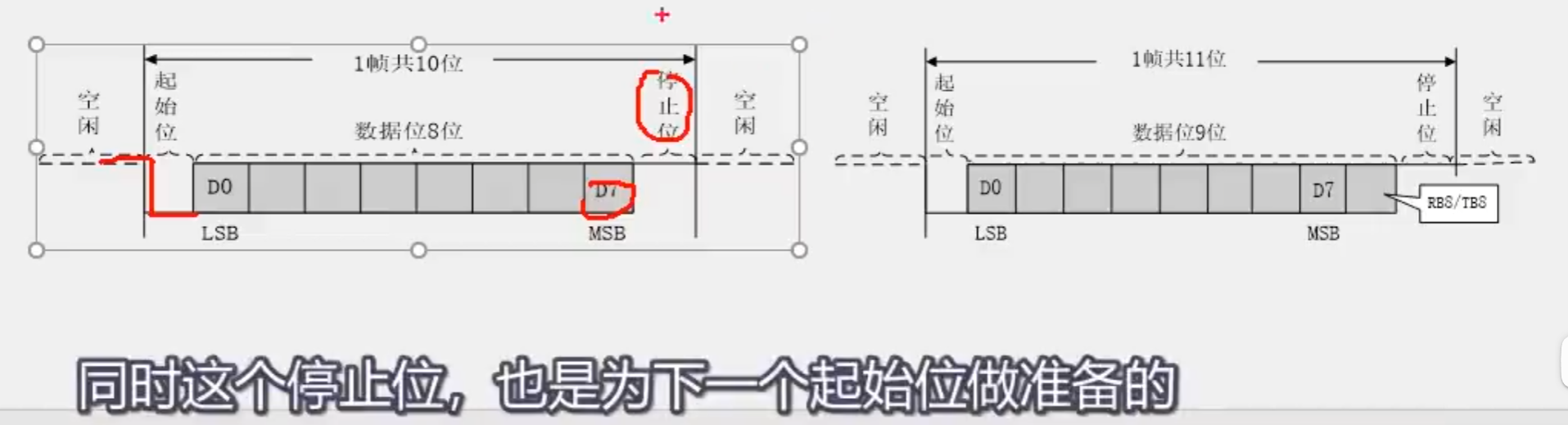
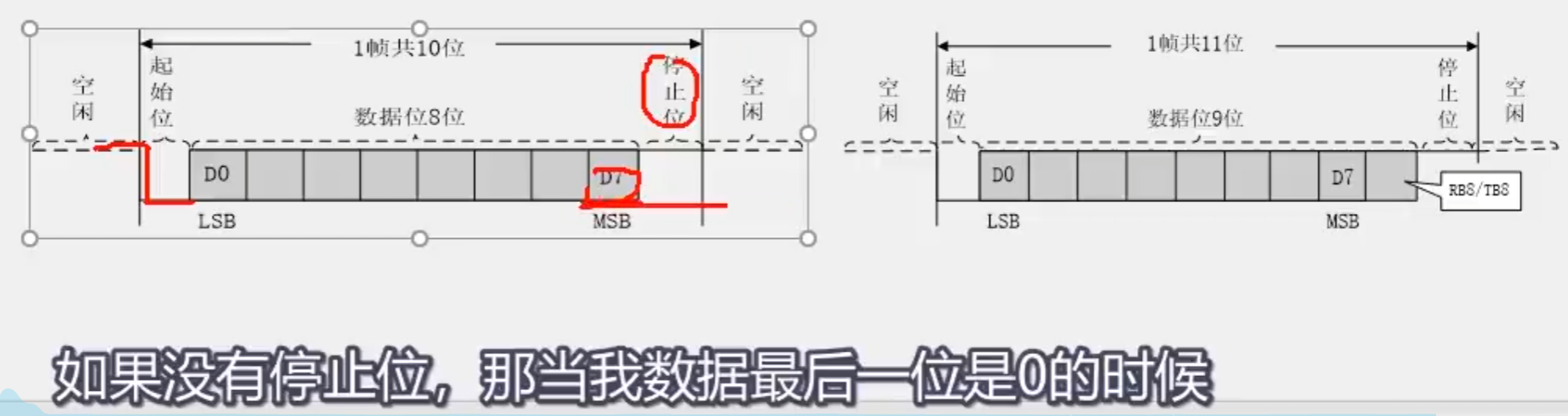
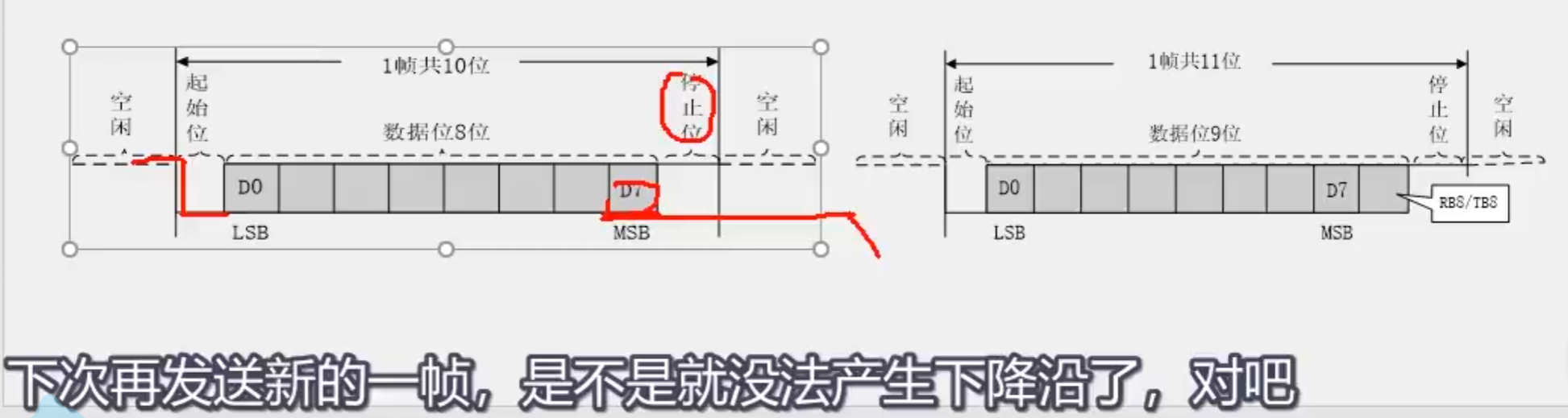
PS: 起始位和停止位的作用。
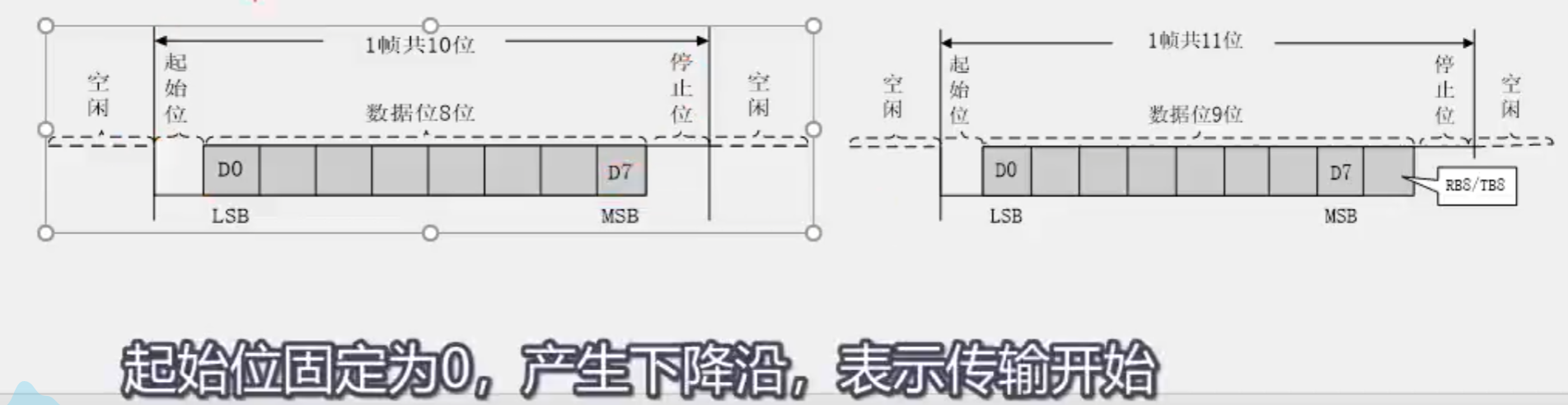
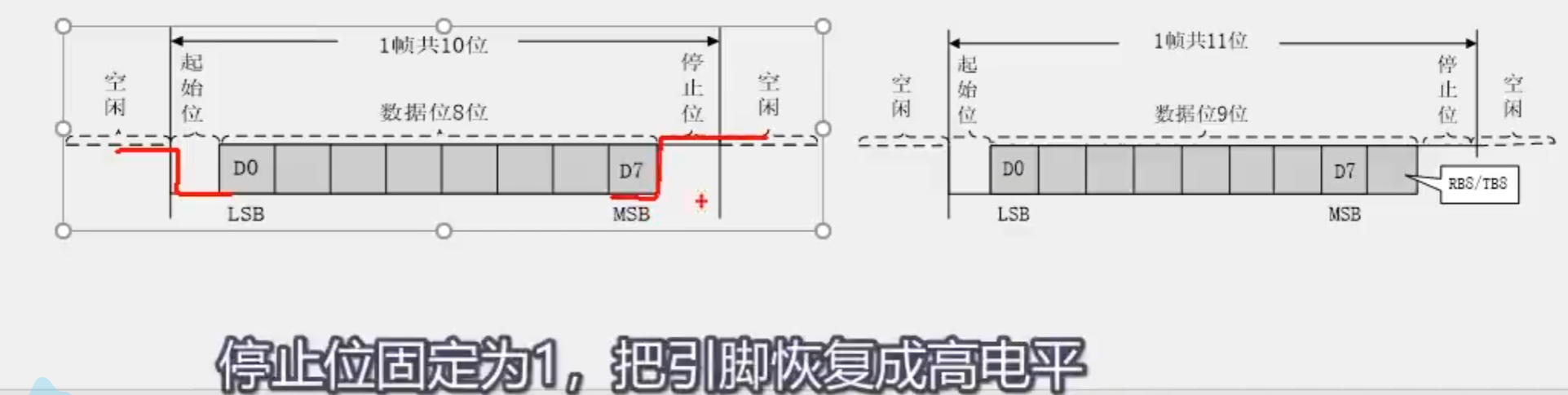
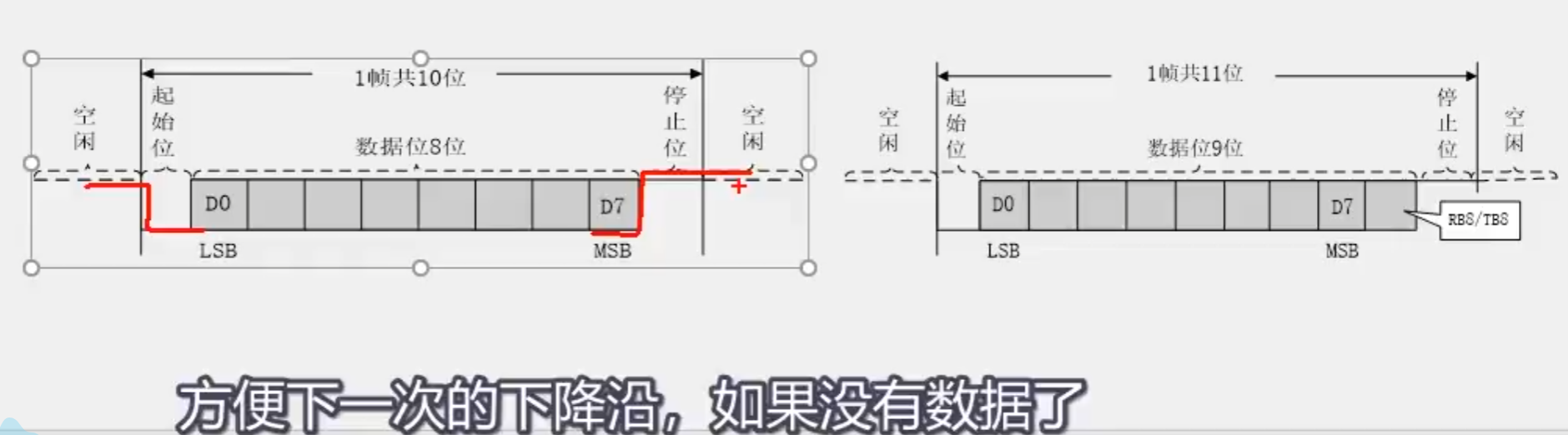
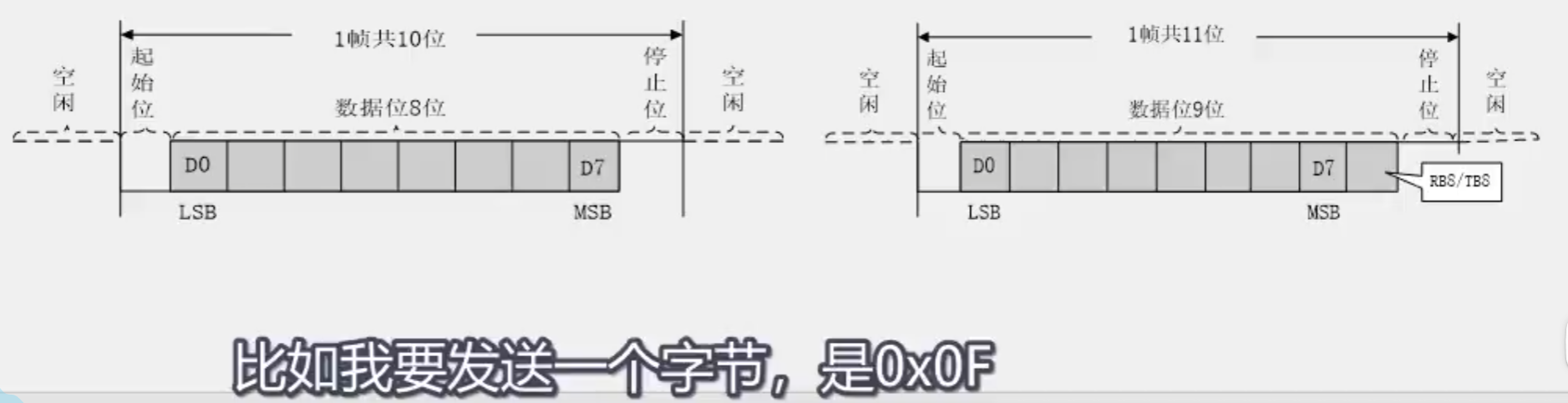
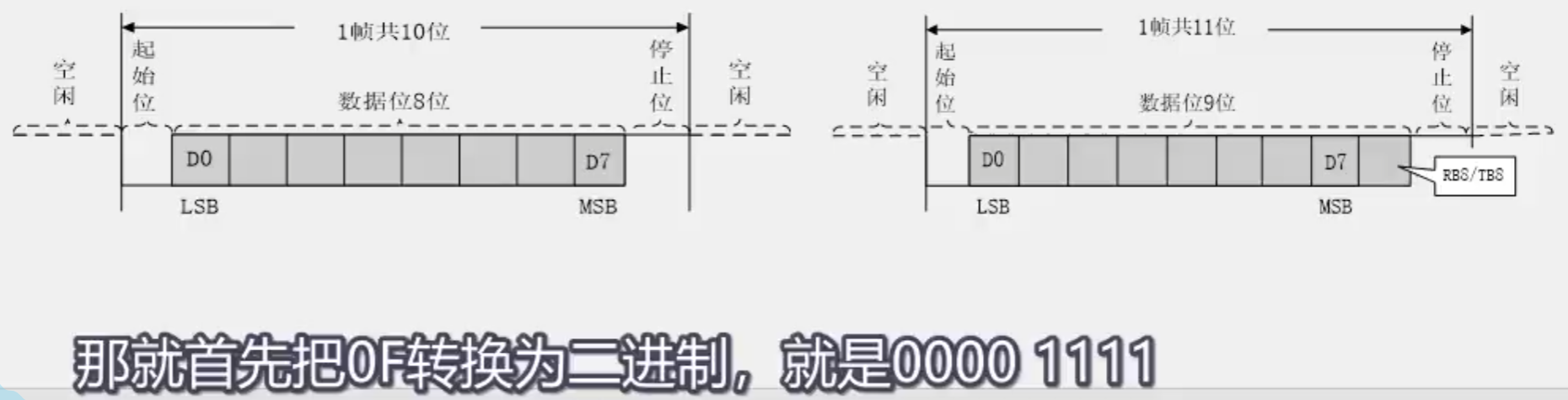
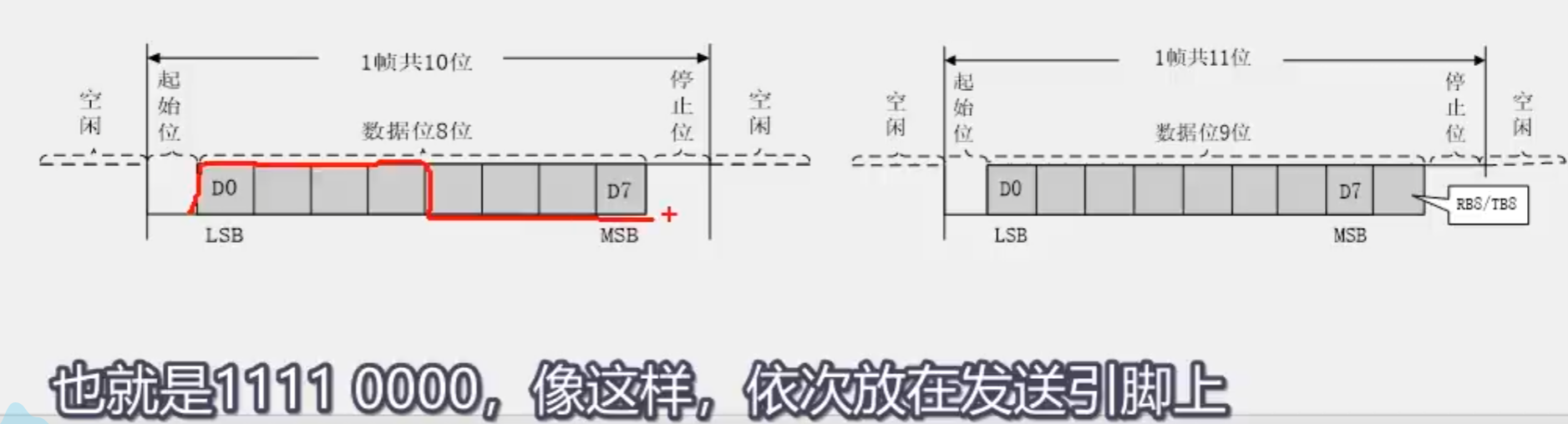
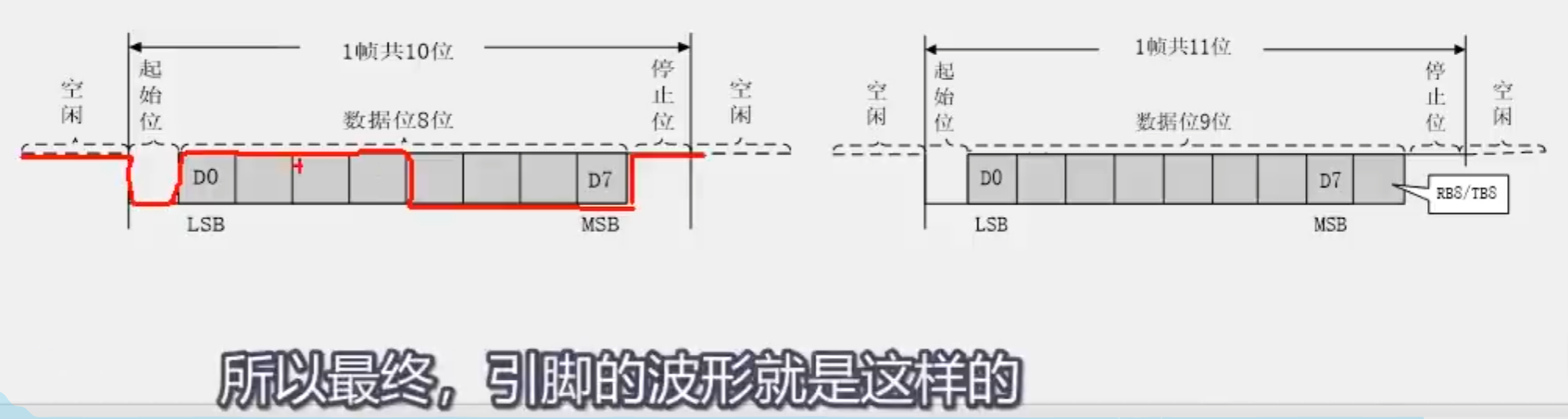
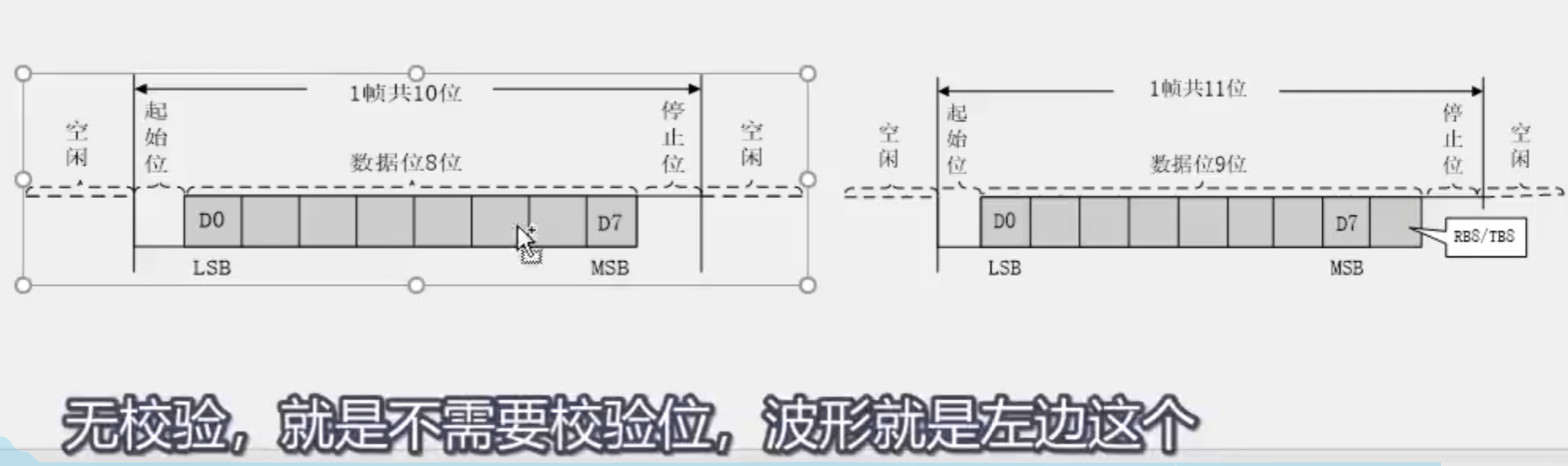
数据位
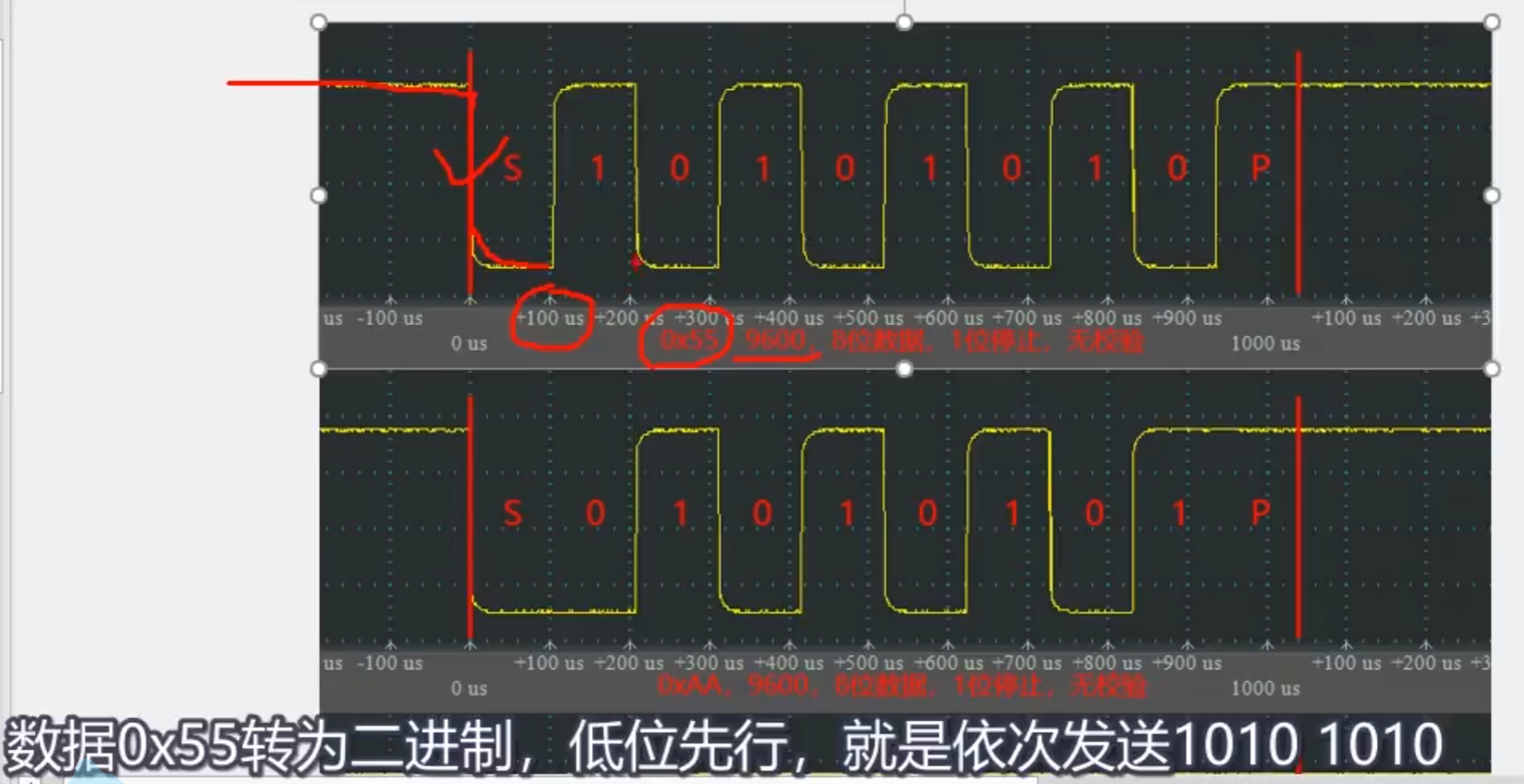
数据帧的有效载荷,1为高电平,0为低电平,低位先行
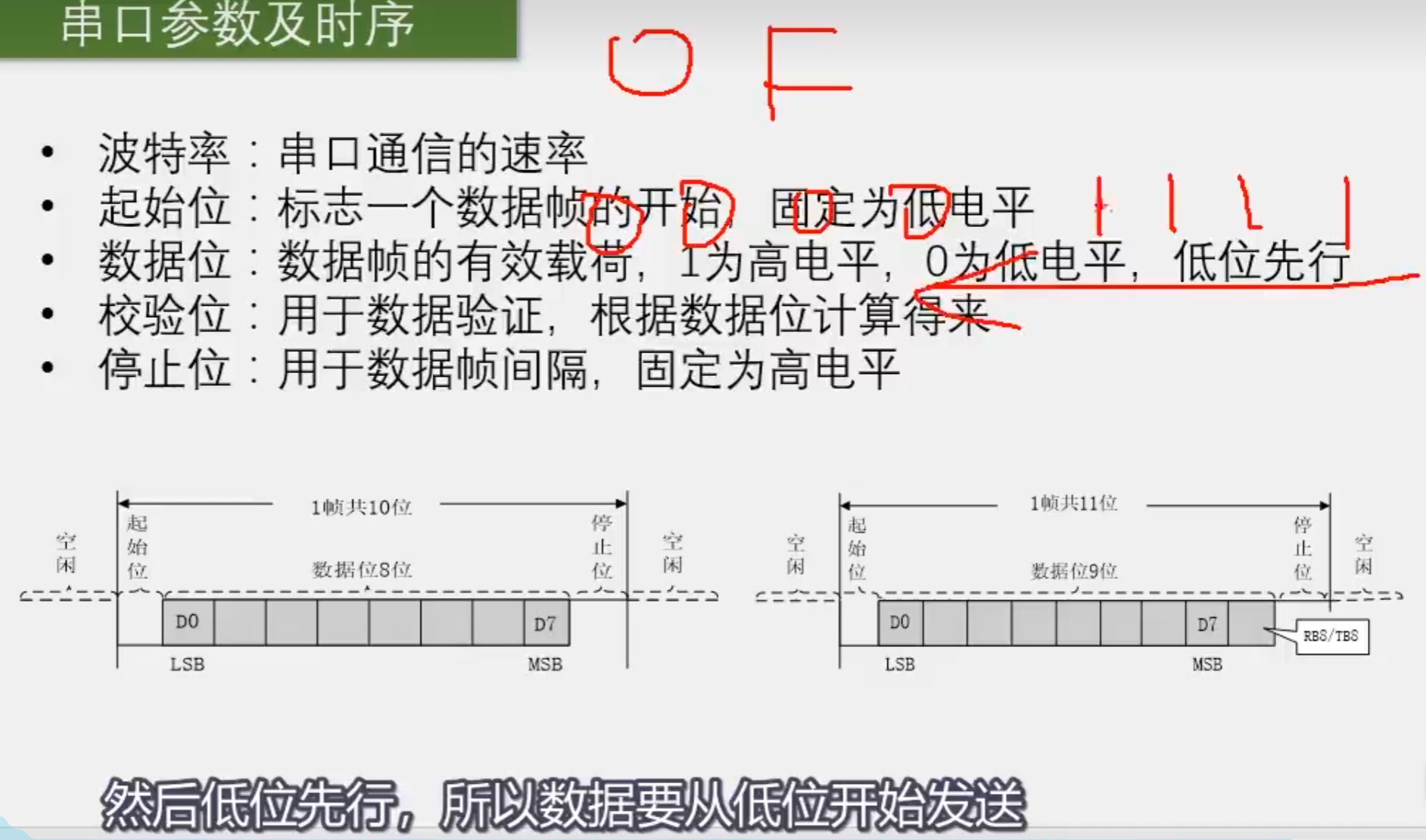
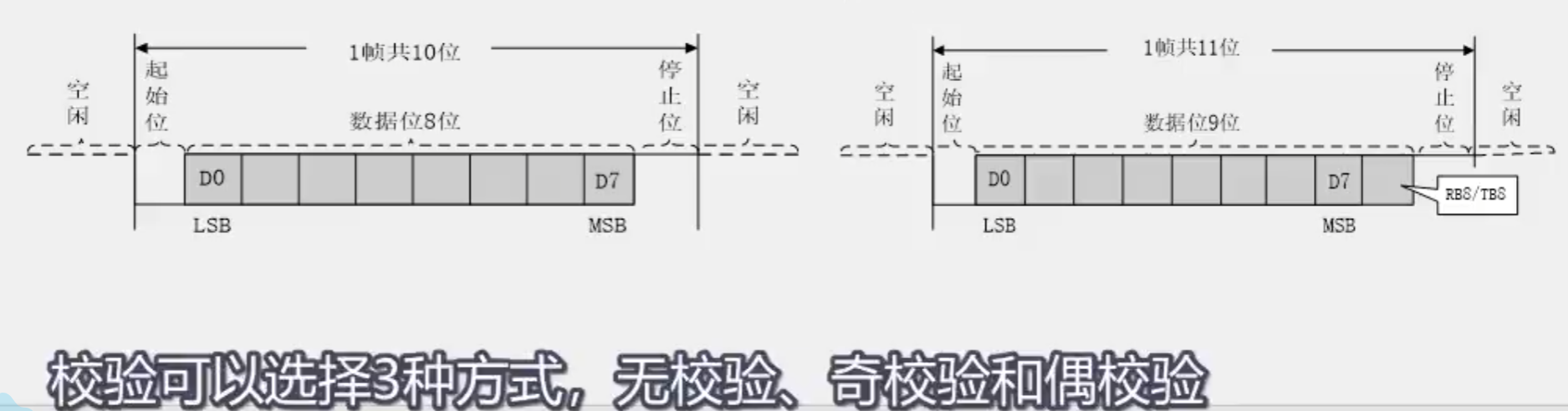
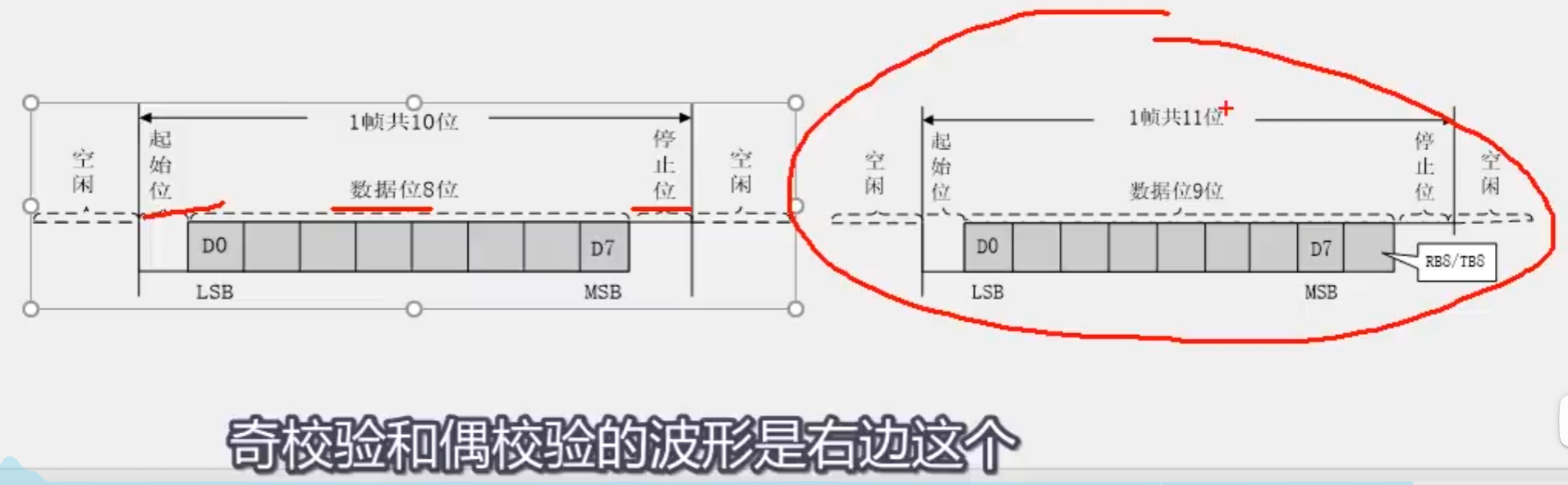
校验位
用于数据验证,根据数据位计算得来
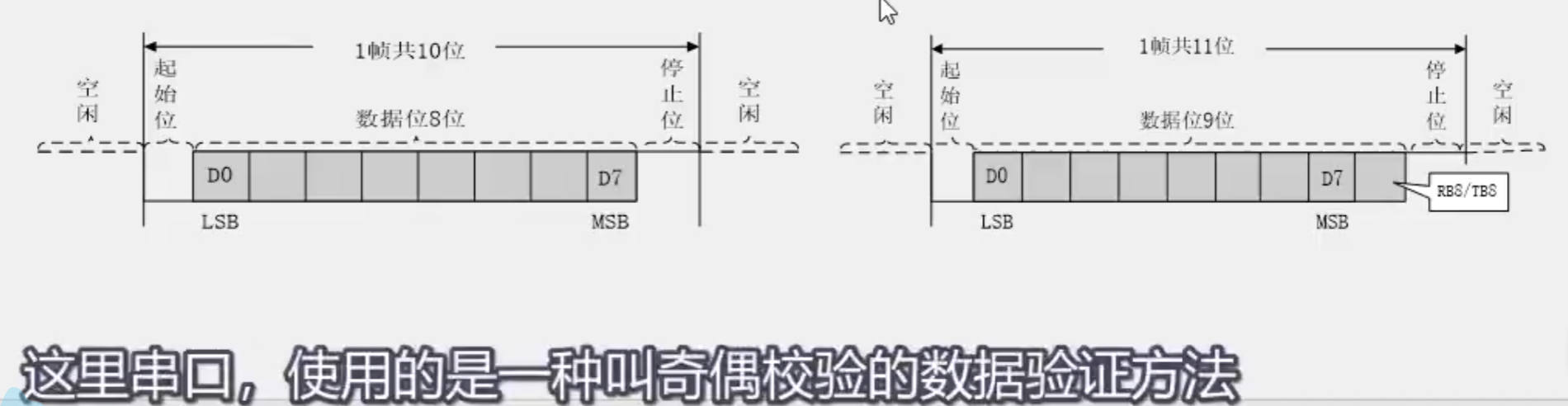
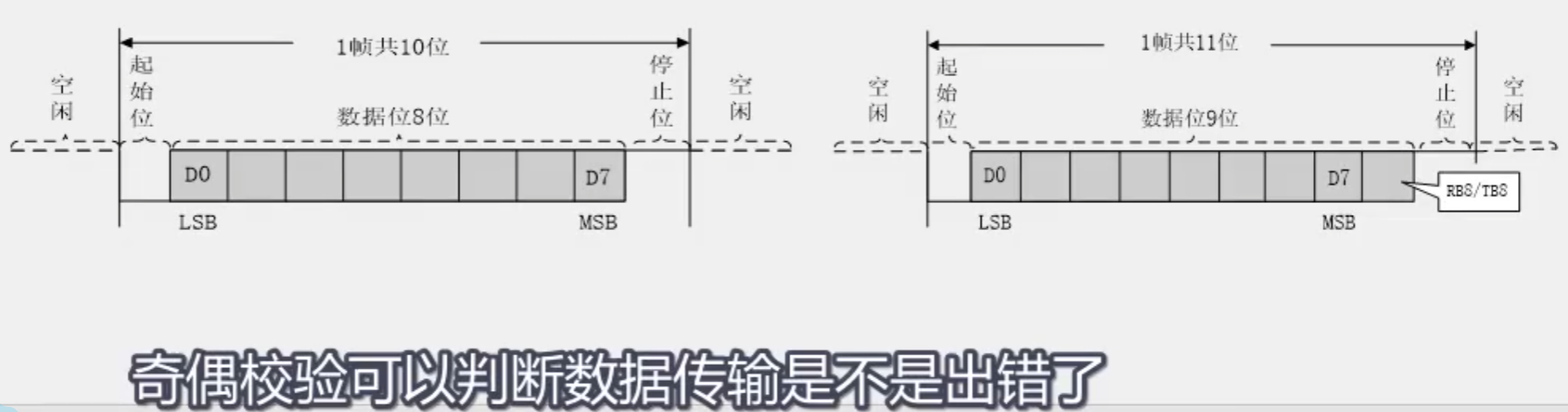
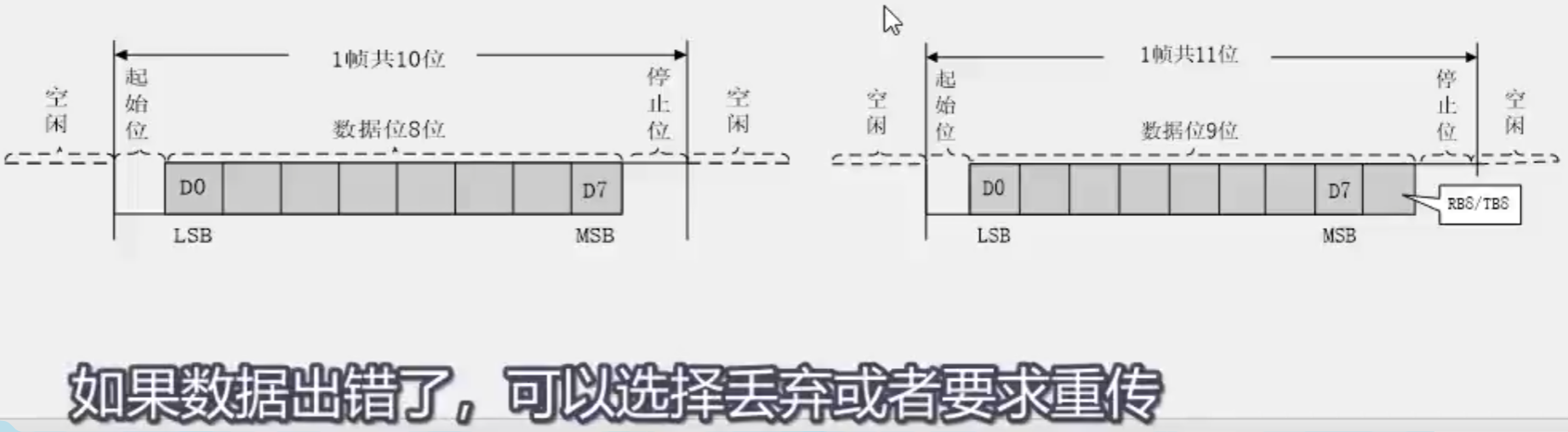
校验方式:
- 无校验
- 奇校验
- 偶校验
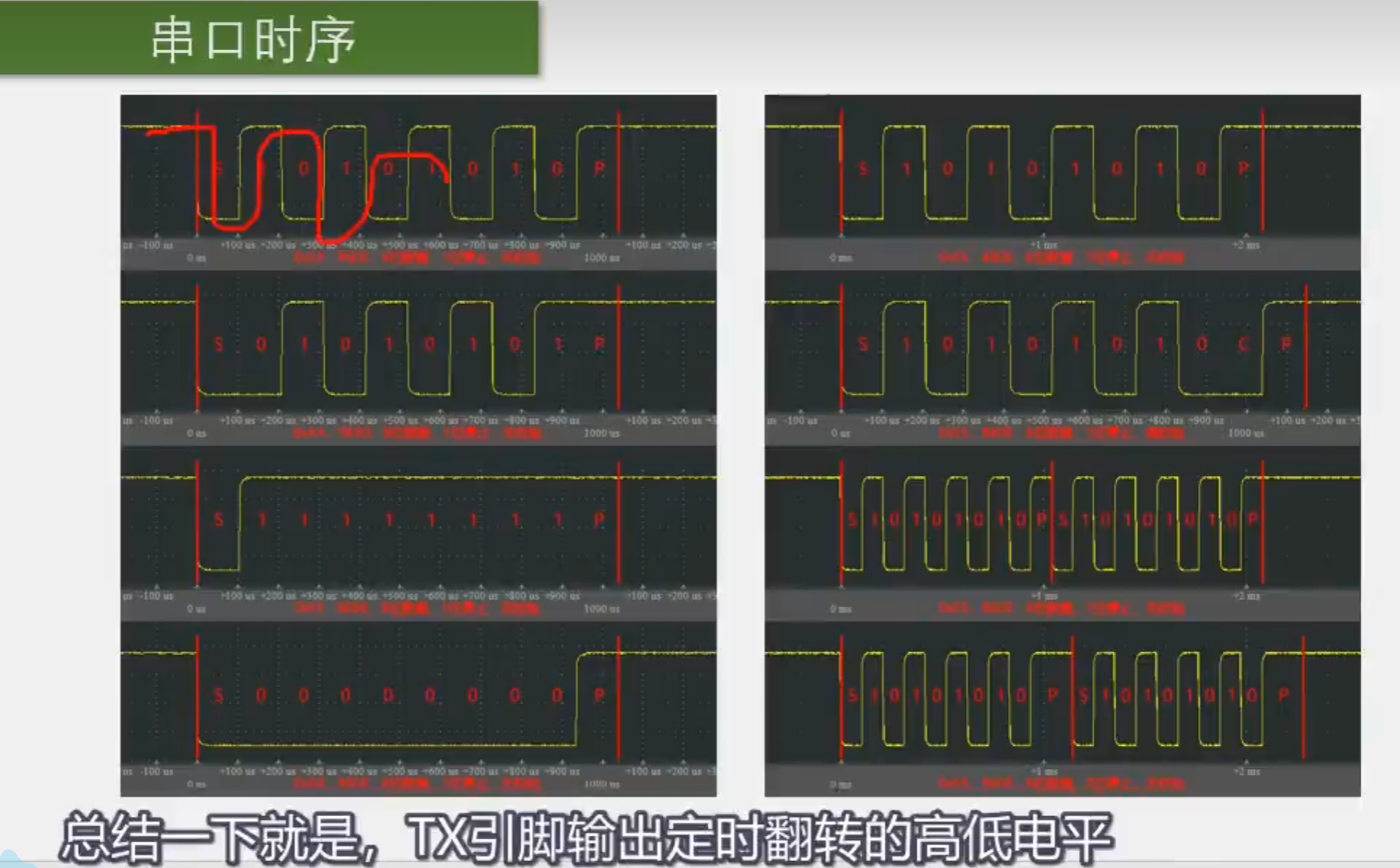
示波器实测波形
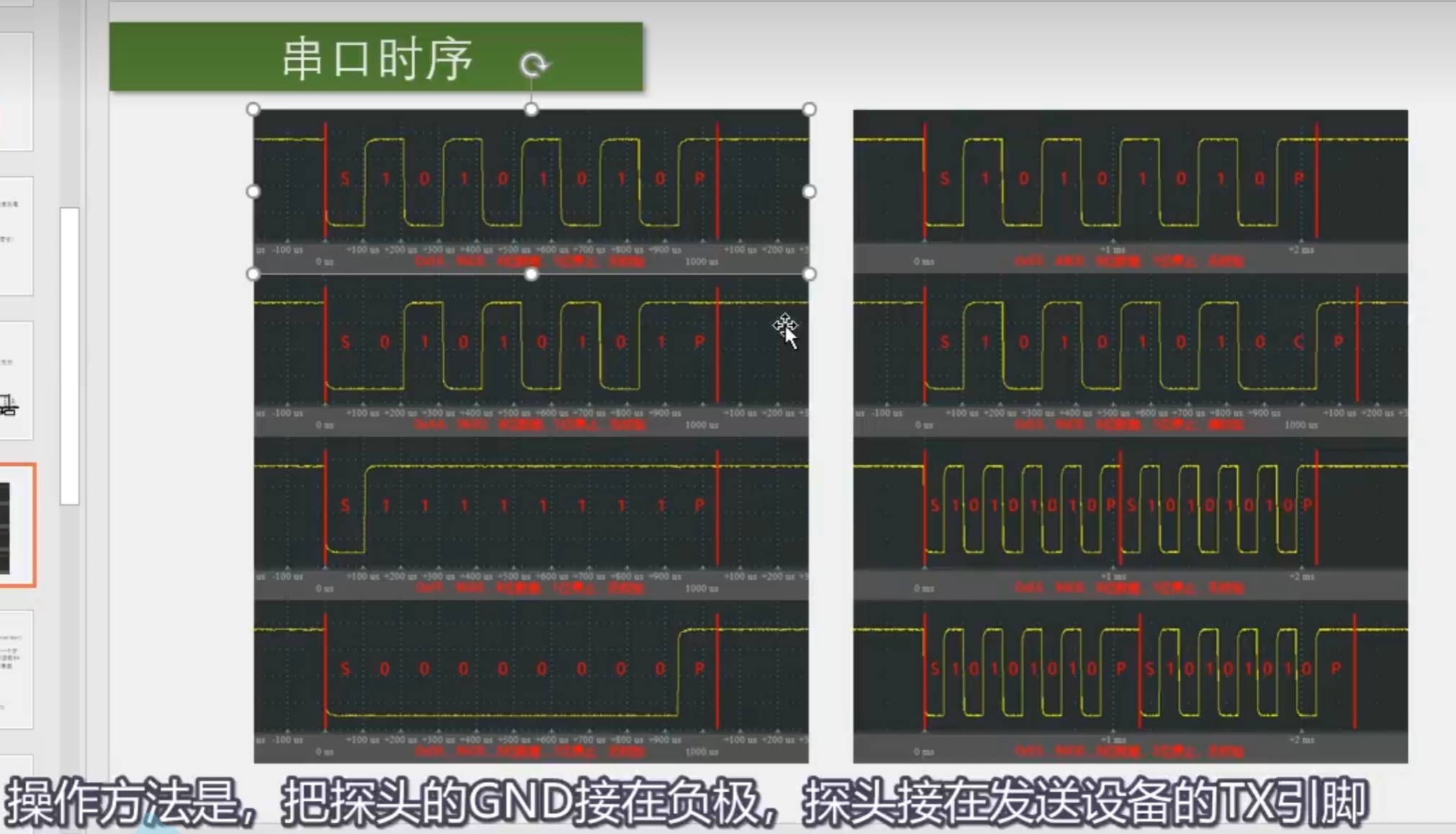
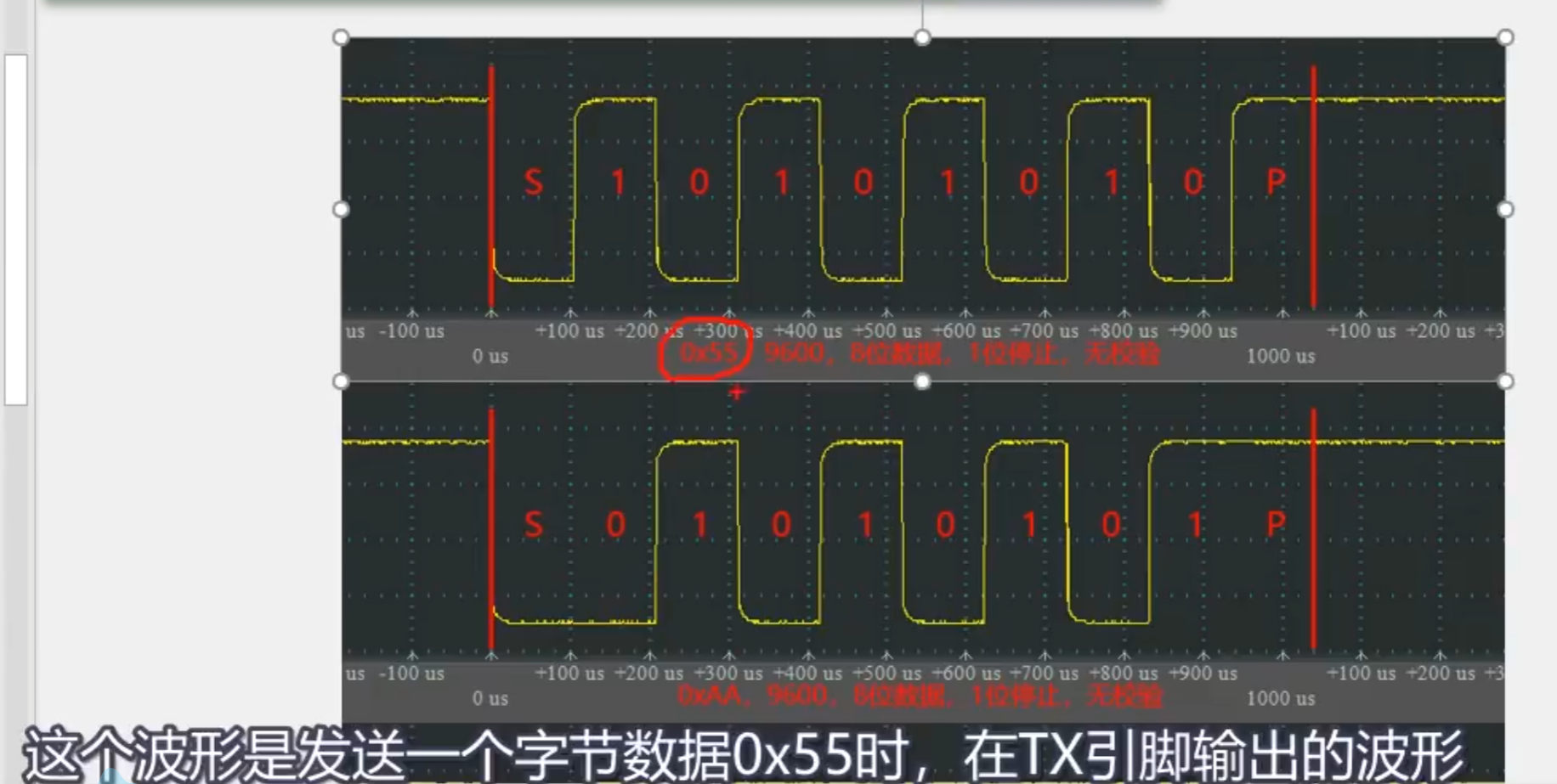
0x55: 0101 0101
由于低位先行,从右往左读,所以是1010 1010.
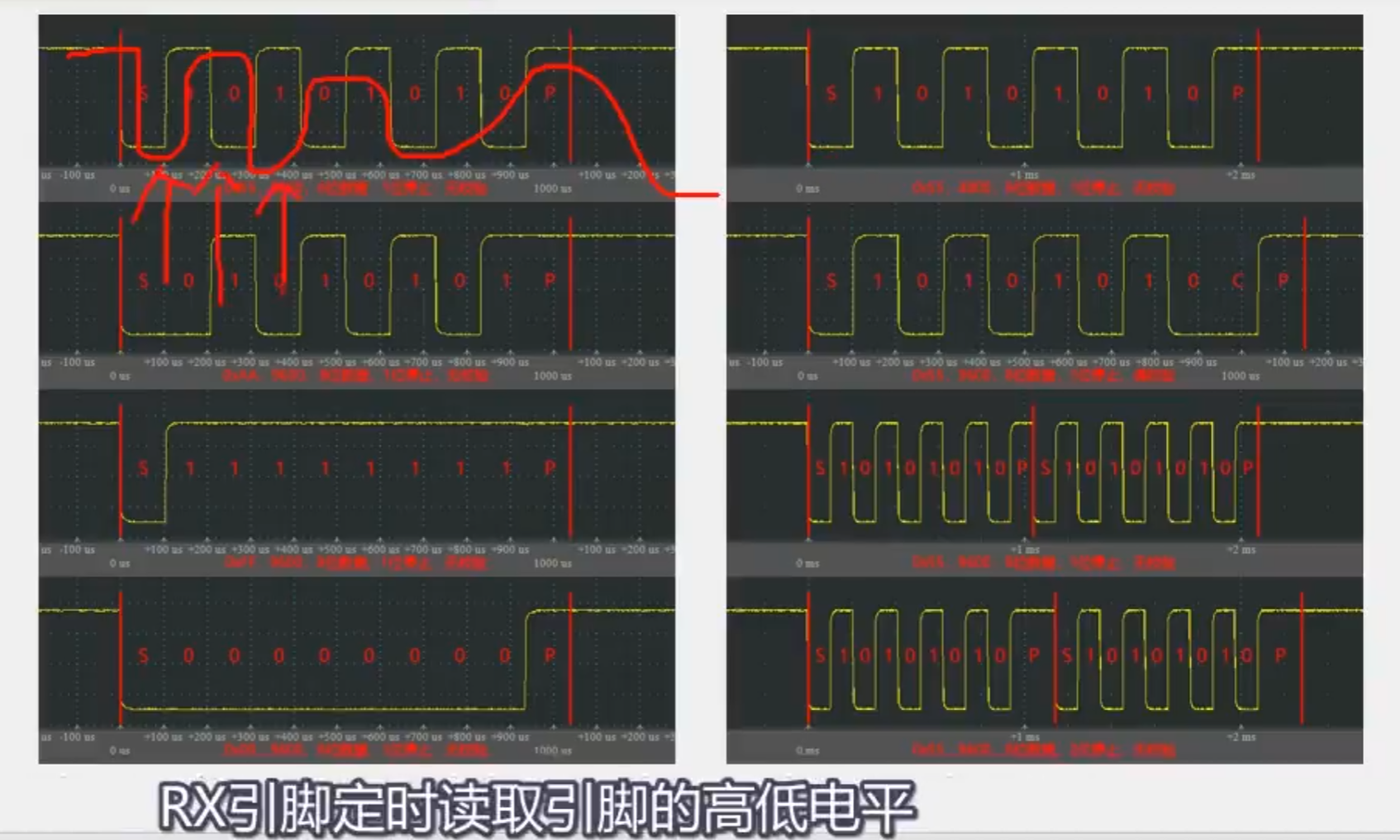
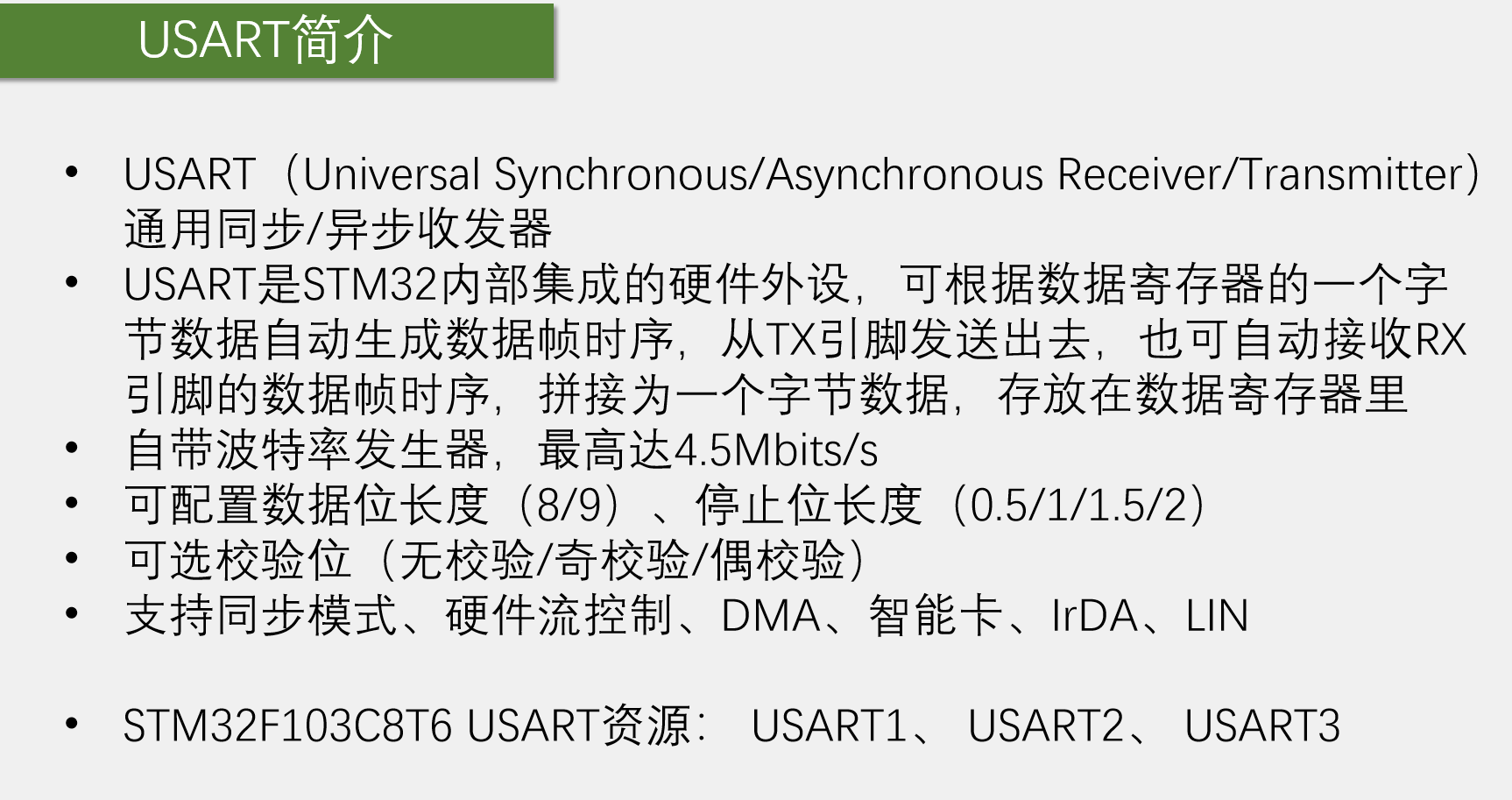
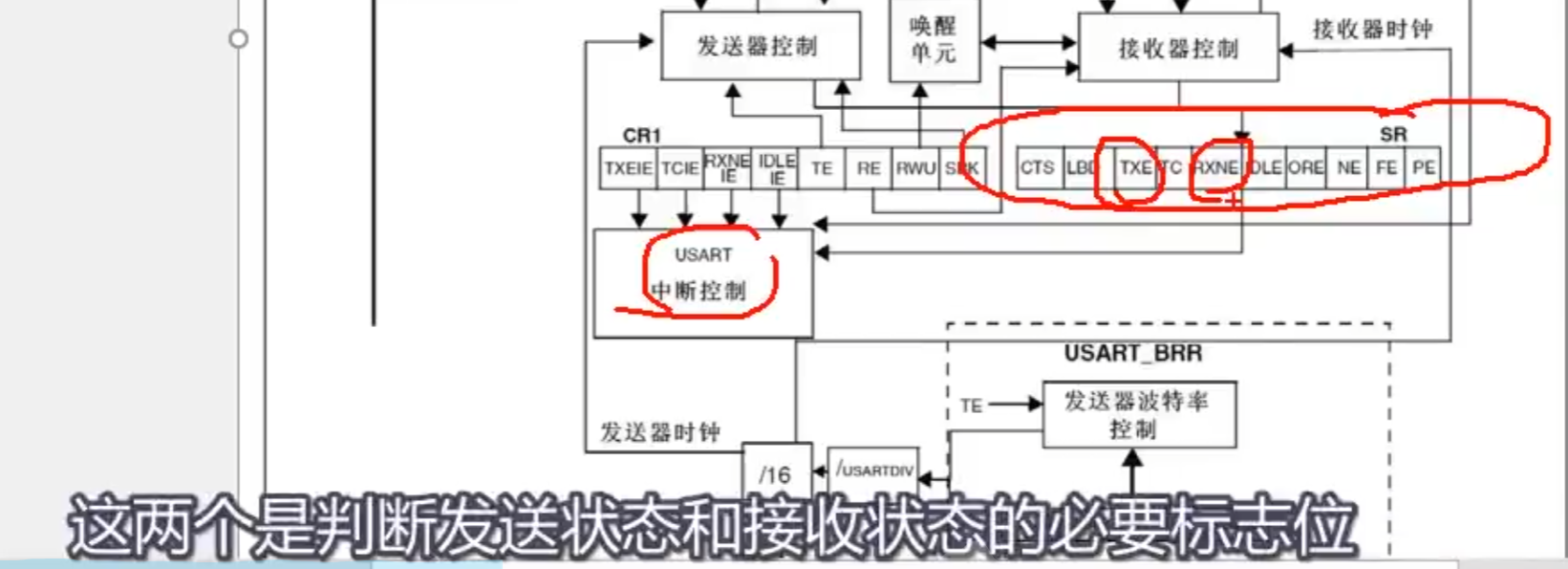
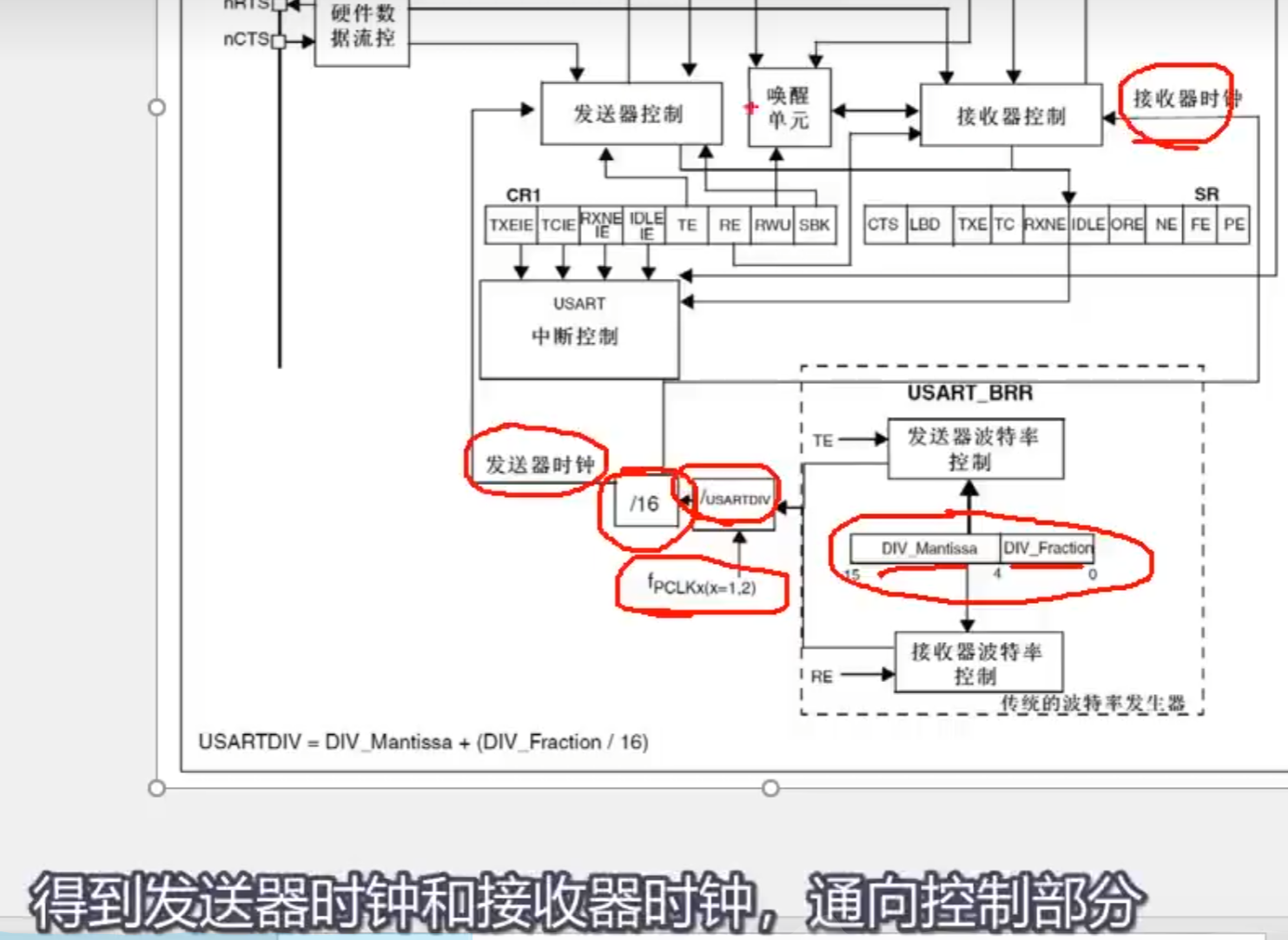
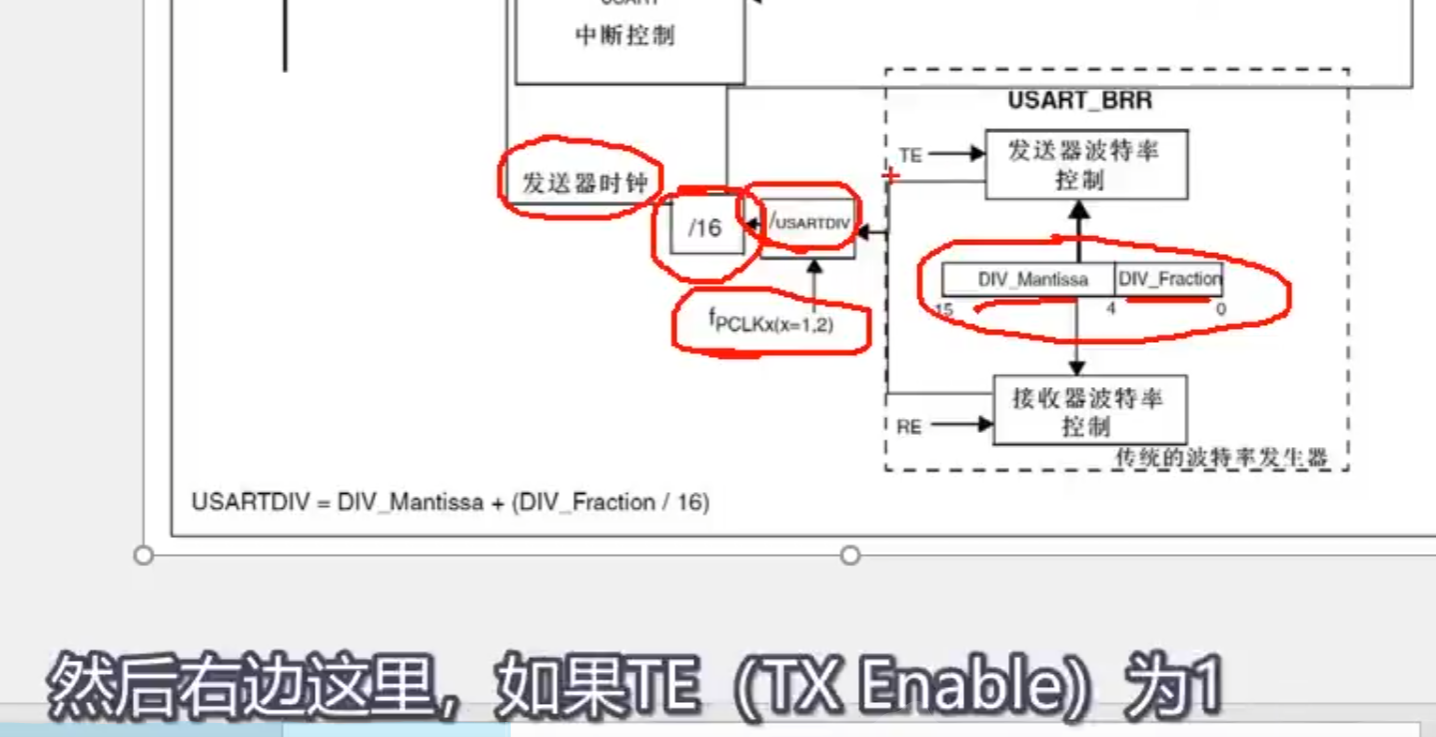
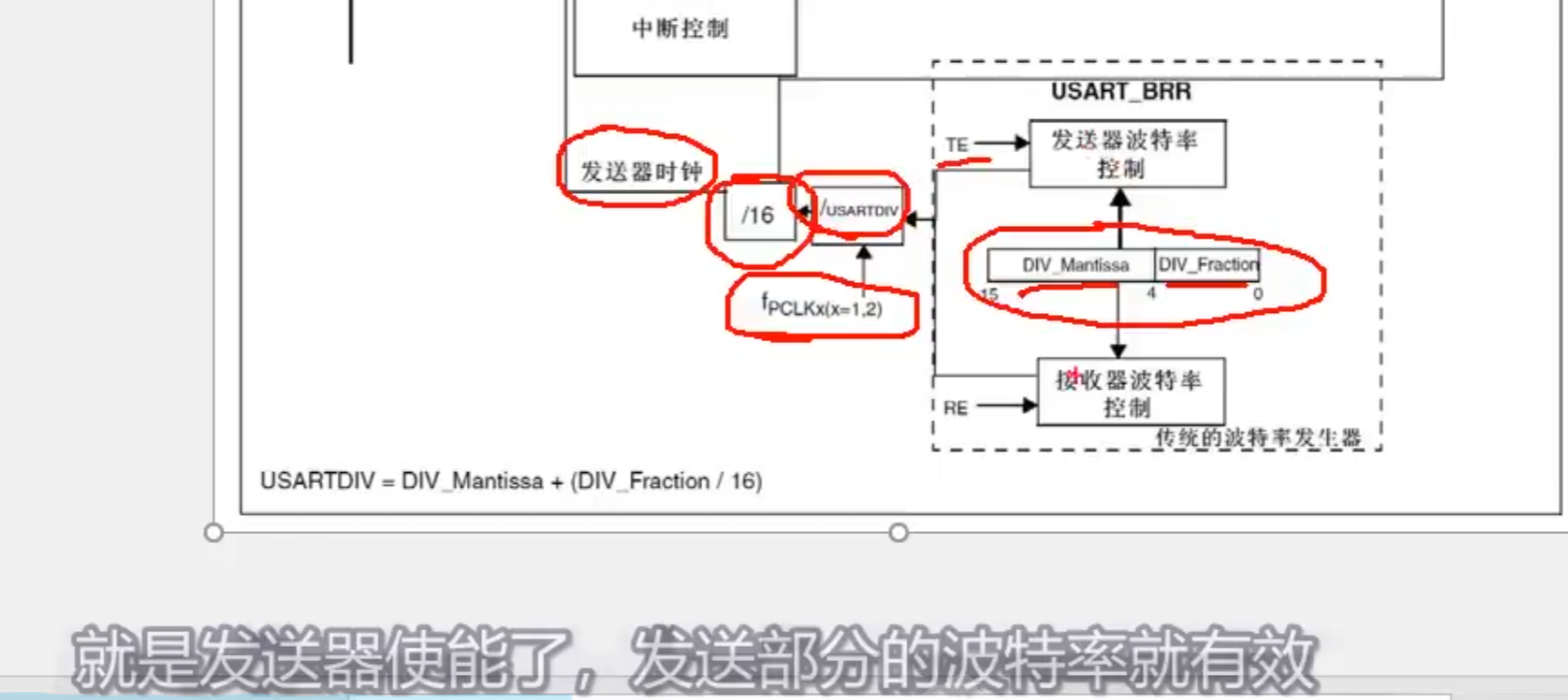
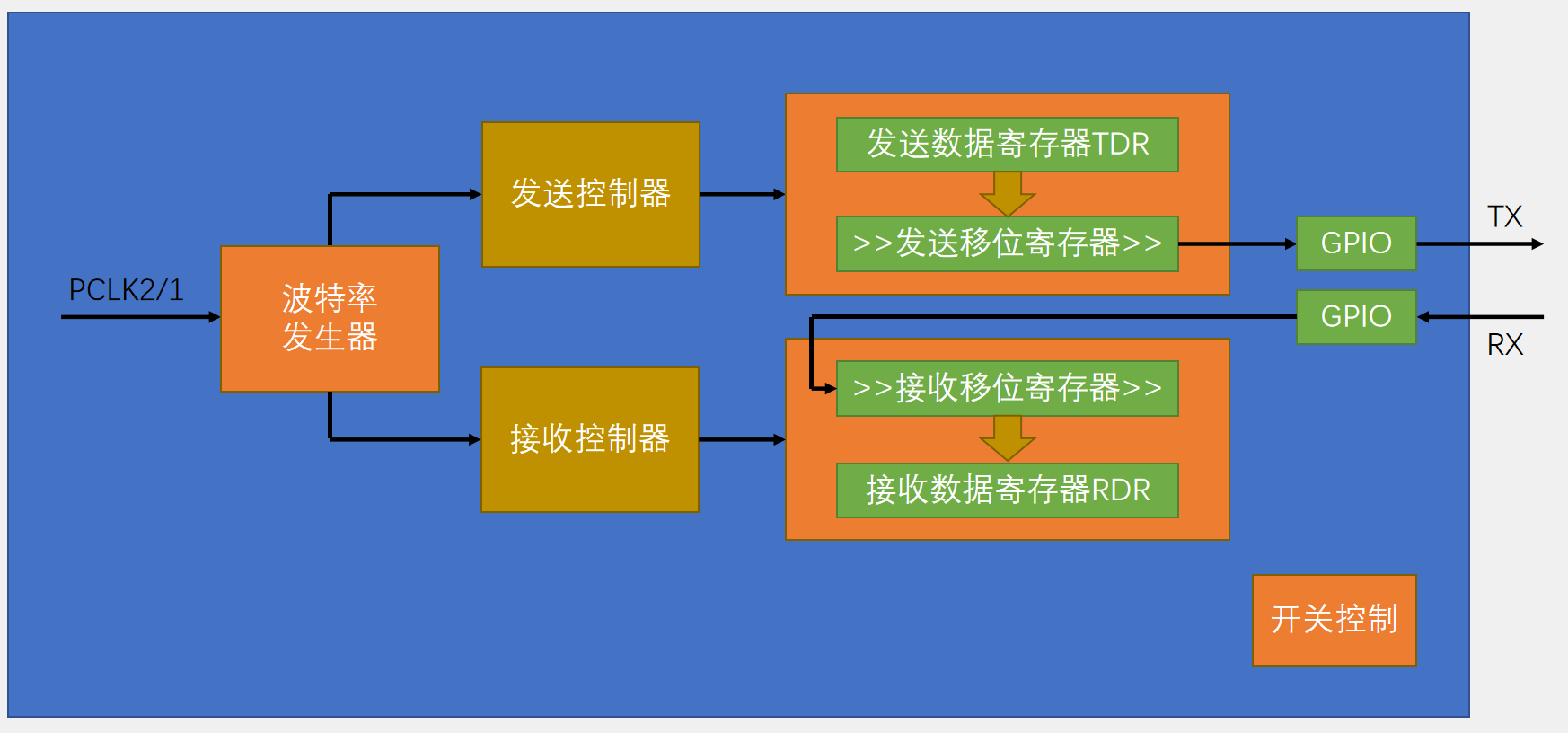
串口外设-USART
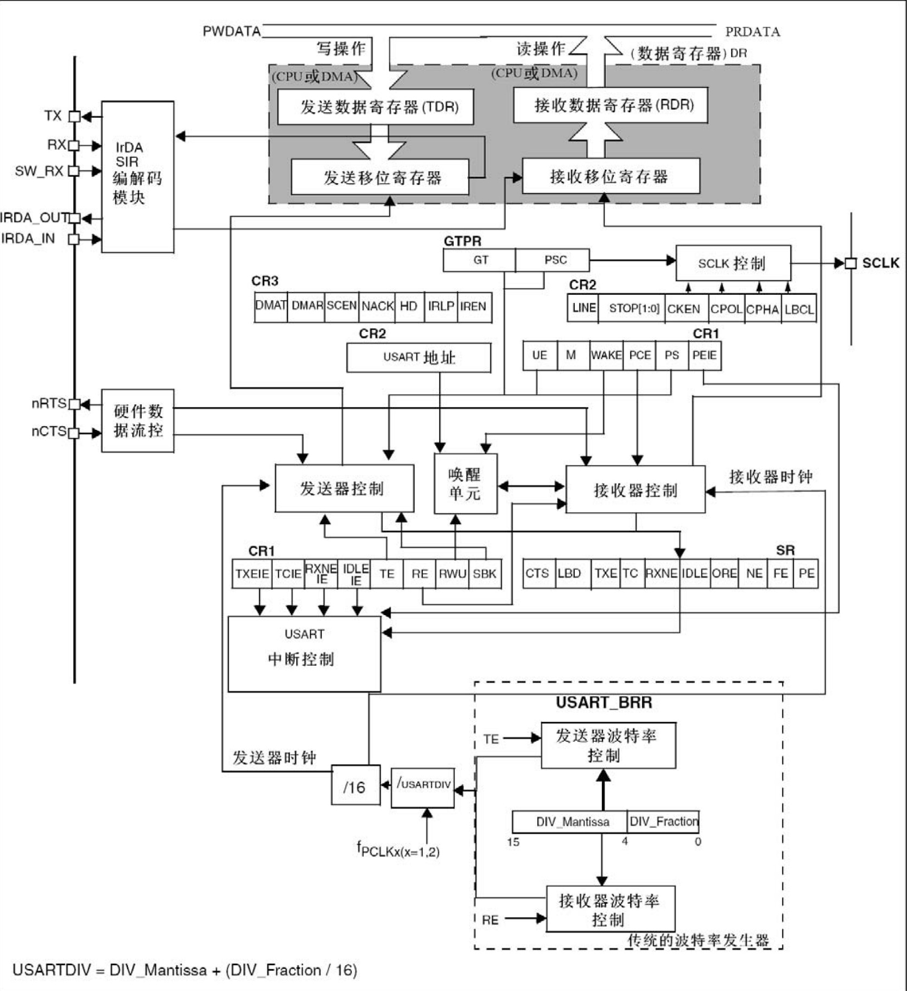
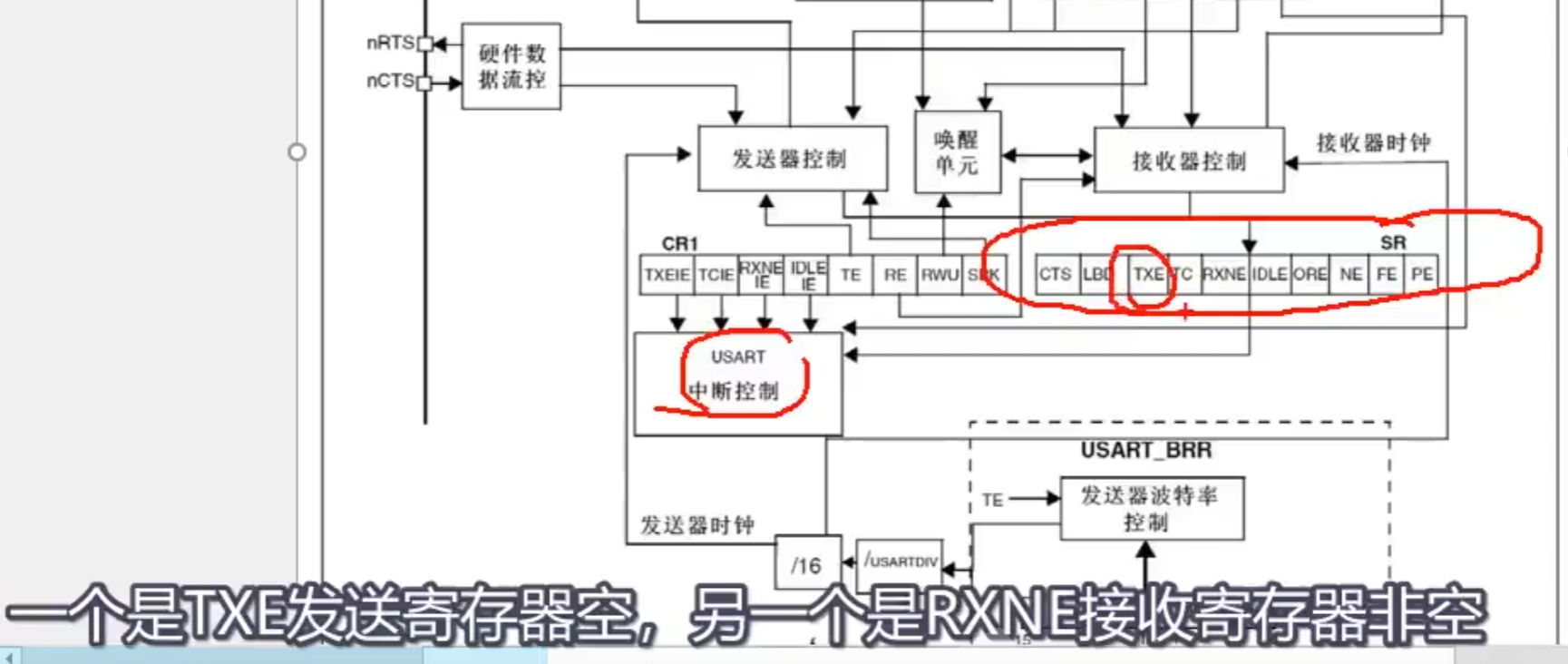
注意:TXE/RXNE

STM32F103C8T6-引脚定义

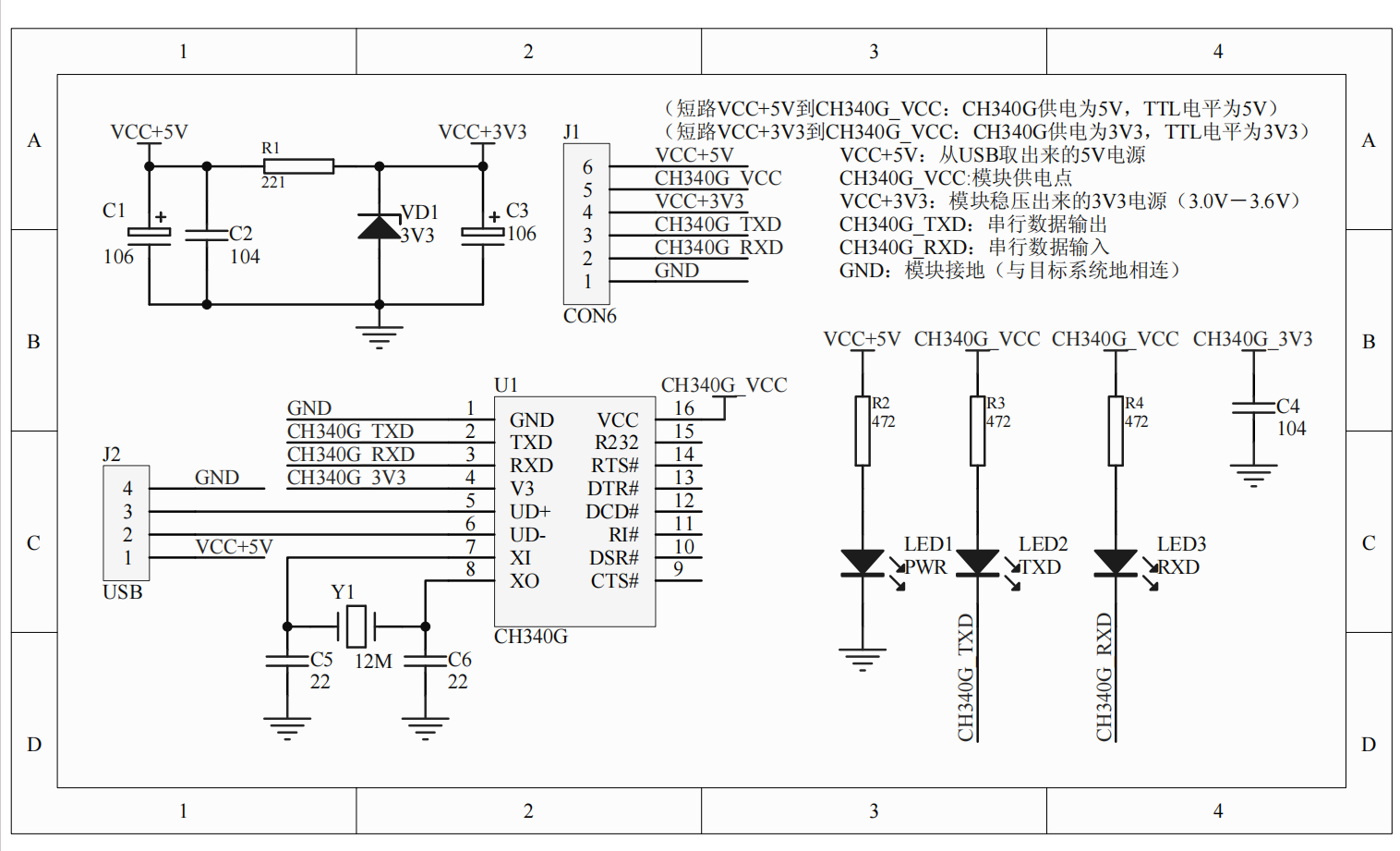
USB-转串口模式图
串口通信代码实现
初始化:
- 第一步:开启时钟,把需要用到的USART和GPIO的时钟打开
- 第二部:GPIO初始化,把TX配置成复用输出,RX配置成输入
- 第三步:配置USART,直接使用一个结构体,把所有的参数配置好
- 第四步:如果只需要发送的功能,就直接开启USART,初始化就结束了;如果还需要接收的功能,可能还需要配置中断。
收发一个字节
serial.h
#ifndef __SERIAL_H
#define __SERIAL_H
#include <stdio.h>
void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array, uint16_t Length);
void Serial_SendString(char *String);
void Serial_SendNumber(uint32_t Number, uint8_t Length);
void Serial_Printf(char *format, ...);
uint8_t Serial_GetRxFlag(void);
uint8_t Serial_GetRxData(void);
#endif
serial.c
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
uint8_t Serial_RxData;
uint8_t Serial_RxFlag;
void Serial_Init(void)
{
// 使用PA9 PA10引脚
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
// TX引脚是USART外设控制的输出脚,所以要选复用推挽输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
// 一般RX都配 浮空输入 或 上拉输入,因为串口波形空闲状态是高电平,所以不使用下拉输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 结构体
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600; //波特率
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //发送模式:即发送又接收
USART_InitStructure.USART_Parity = USART_Parity_No; //校验模式:无校验
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位:1位
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //数据位:8位
USART_Init(USART1, &USART_InitStructure);
// 开启中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
// USART_IT_RXNE 一旦置1就会向NVIC申请中断
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
// 开启
USART_Cmd(USART1, ENABLE);
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
// 写操作需要清零,也就是说写的过程这一致为0,写完了为1
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)
{
Serial_SendByte(String[i]);
}
}
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y --)
{
Result *= X;
}
return Result;
}
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++)
{
// 取某一位:(Num/10^x) %10 : (12345/10^3)%10 == 3【从右往左的第3位,索引:4 3 2 1 0】【10是基数,x是位数】
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0');
}
}
// printf【fputc是printf的底层函数】输出重定向到串口
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
// printf 的可以参数写法
void Serial_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg, format);
vsprintf(String, format, arg);
va_end(arg);
Serial_SendString(String);
}
// 配合自动清零
uint8_t Serial_GetRxFlag(void)
{
if (Serial_RxFlag == 1)
{
Serial_RxFlag = 0;
return 1;
}
return 0;
}
uint8_t Serial_GetRxData(void)
{
return Serial_RxData;
}
// 中断启动
void USART1_IRQHandler(void)
{
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
Serial_RxData = USART_ReceiveData(USART1);
Serial_RxFlag = 1;
USART_ClearITPendingBit(USART1, USART_IT_RXNE); //清零
}
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
uint8_t RxData;
int main(void)
{
OLED_Init();
OLED_ShowString(1, 1, "RxData:");
Serial_Init();
while (1)
{
if (Serial_GetRxFlag() == 1)
{
// 接收数据
RxData = Serial_GetRxData();
// 接收到的数据回传电脑
Serial_SendByte(RxData);
// OLED显示接收数据
OLED_ShowHexNum(1, 8, RxData, 2);
}
}
}
收发数据包
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
#include "Key.h"
uint8_t KeyNum;
int main(void)
{
OLED_Init();
Key_Init();
Serial_Init();
// FF 11 22 33 44 FE
OLED_ShowString(1, 1, "TxPacket");
//
OLED_ShowString(3, 1, "RxPacket");
Serial_TxPacket[0] = 0x01;
Serial_TxPacket[1] = 0x02;
Serial_TxPacket[2] = 0x03;
Serial_TxPacket[3] = 0x04;
while (1)
{
KeyNum = Key_GetNum();
if (KeyNum == 1)
{
Serial_TxPacket[0] ++;
Serial_TxPacket[1] ++;
Serial_TxPacket[2] ++;
Serial_TxPacket[3] ++;
Serial_SendPacket();
OLED_ShowHexNum(2, 1, Serial_TxPacket[0], 2);
OLED_ShowHexNum(2, 4, Serial_TxPacket[1], 2);
OLED_ShowHexNum(2, 7, Serial_TxPacket[2], 2);
OLED_ShowHexNum(2, 10, Serial_TxPacket[3], 2);
}
if (Serial_GetRxFlag() == 1)
{
OLED_ShowHexNum(4, 1, Serial_RxPacket[0], 2);
OLED_ShowHexNum(4, 4, Serial_RxPacket[1], 2);
OLED_ShowHexNum(4, 7, Serial_RxPacket[2], 2);
OLED_ShowHexNum(4, 10, Serial_RxPacket[3], 2);
}
}
}
serial.h
#ifndef __SERIAL_H
#define __SERIAL_H
#include <stdio.h>
extern uint8_t Serial_TxPacket[];
extern uint8_t Serial_RxPacket[];
void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array, uint16_t Length);
void Serial_SendString(char *String);
void Serial_SendNumber(uint32_t Number, uint8_t Length);
void Serial_Printf(char *format, ...);
void Serial_SendPacket(void);
uint8_t Serial_GetRxFlag(void);
#endif
serial.c
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
uint8_t Serial_TxPacket[4]; //FF 01 02 03 04 FE
uint8_t Serial_RxPacket[4];
uint8_t Serial_RxFlag;
void Serial_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART1, ENABLE);
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)
{
Serial_SendByte(String[i]);
}
}
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y --)
{
Result *= X;
}
return Result;
}
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0');
}
}
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
void Serial_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg, format);
vsprintf(String, format, arg);
va_end(arg);
Serial_SendString(String);
}
void Serial_SendPacket(void)
{
Serial_SendByte(0xFF);
Serial_SendArray(Serial_TxPacket, 4);
Serial_SendByte(0xFE);
}
uint8_t Serial_GetRxFlag(void)
{
if (Serial_RxFlag == 1)
{
Serial_RxFlag = 0;
return 1;
}
return 0;
}
void USART1_IRQHandler(void)
{
// static 只能在本函数使用
static uint8_t RxState = 0;
static uint8_t pRxPacket = 0;
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
uint8_t RxData = USART_ReceiveData(USART1);
if (RxState == 0)
{
if (RxData == 0xFF)
{
RxState = 1;
pRxPacket = 0;
}
}
else if (RxState == 1)
{
Serial_RxPacket[pRxPacket] = RxData;
pRxPacket ++;
if (pRxPacket >= 4)
{
RxState = 2;
}
}
else if (RxState == 2)
{
if (RxData == 0xFE)
{
RxState = 0;
Serial_RxFlag = 1;
}
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
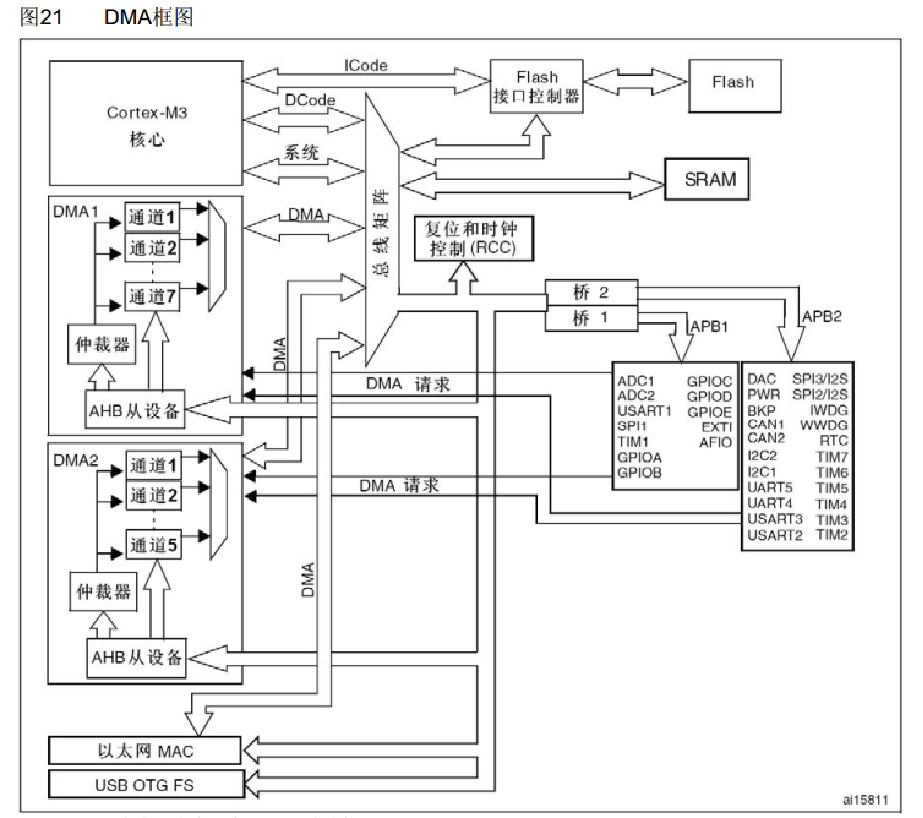
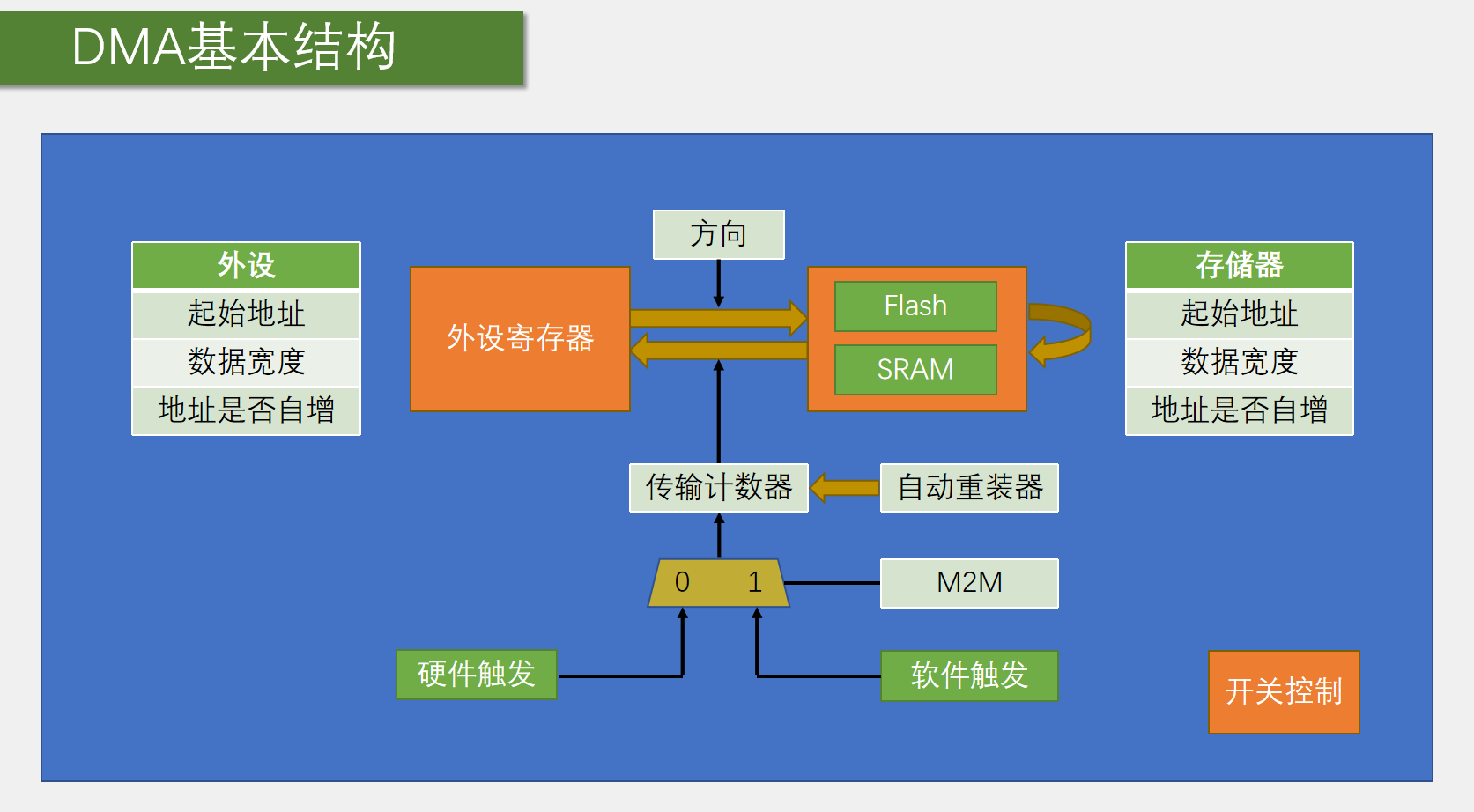
DMA
存储器 –> 存储器的数据转运,一般使用软件触发;
外设 –> 存储器的数据转运,一般使用硬件触发。
ROM【只读存储器】:非易失性、掉电不丢失的存储器;
RAM【随机存储器】:易失性、掉电丢失的存储器。

0x0800 0000 : 主闪存地址 【Flash】
0x4000 0000:外设寄存器【SRAM】
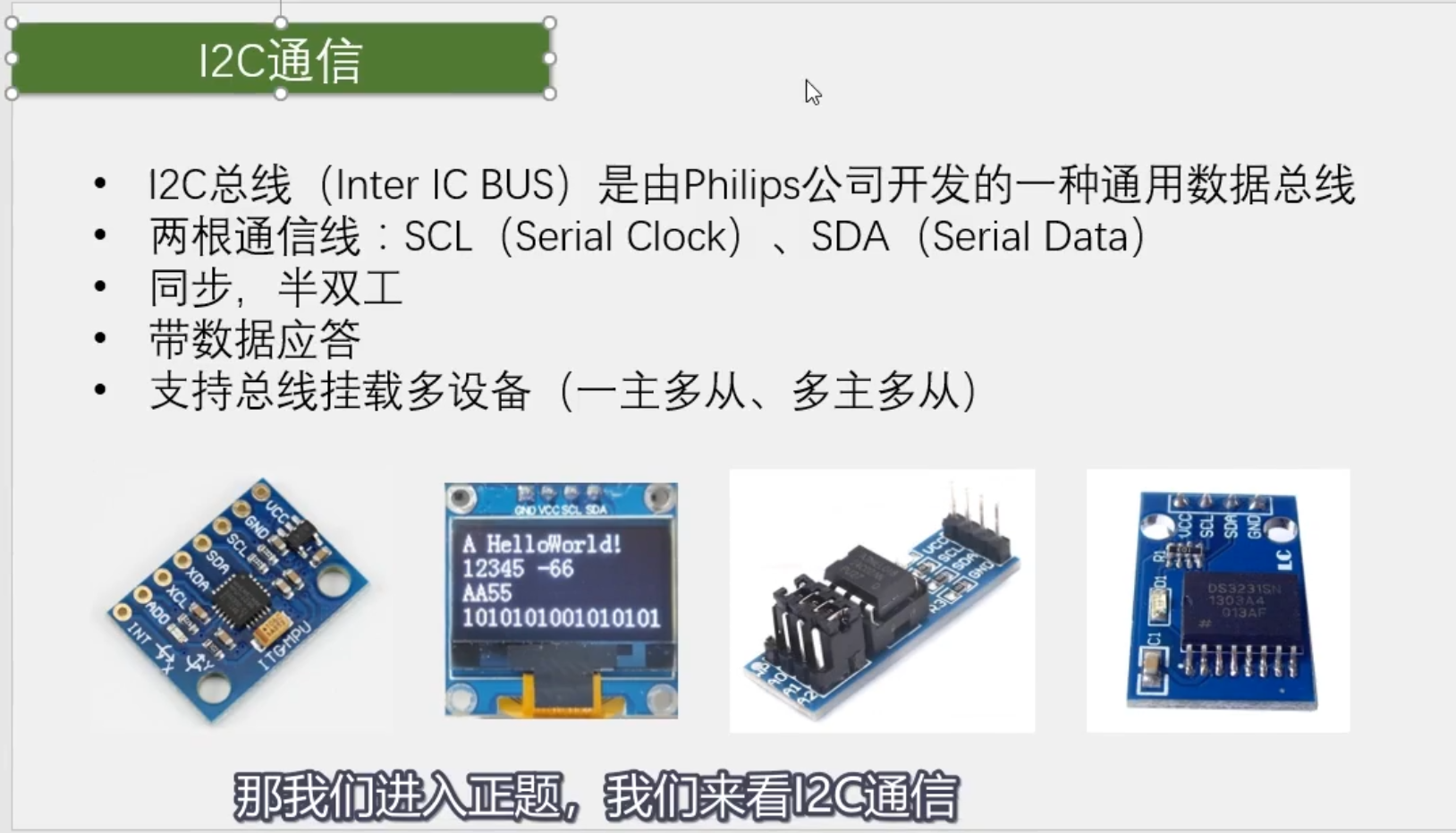
I2C通信
Inter IC BUS :
- SCL:串行时钟
- SDA: 串行数据
- 同步,半双工
- 带数据应答
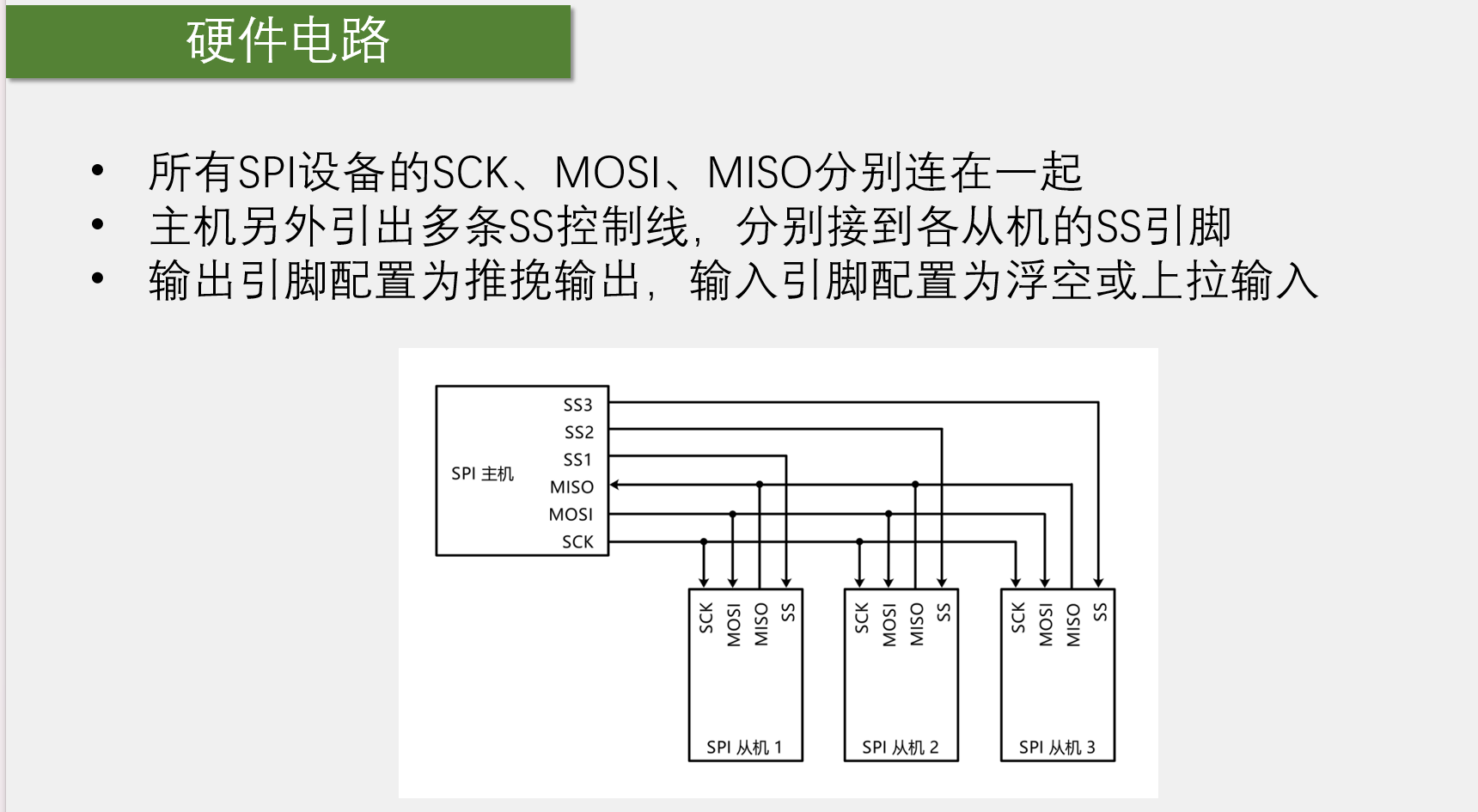
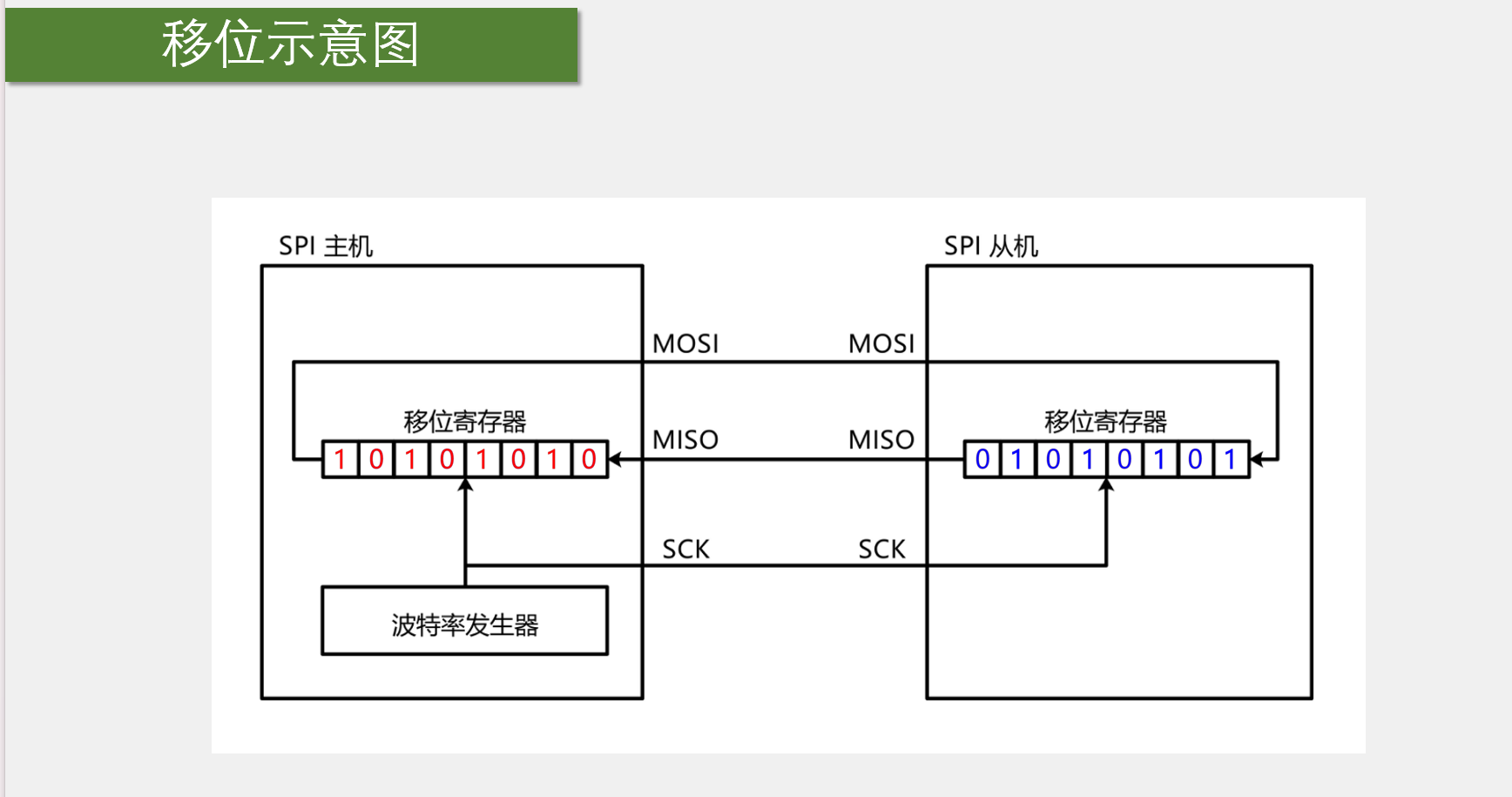
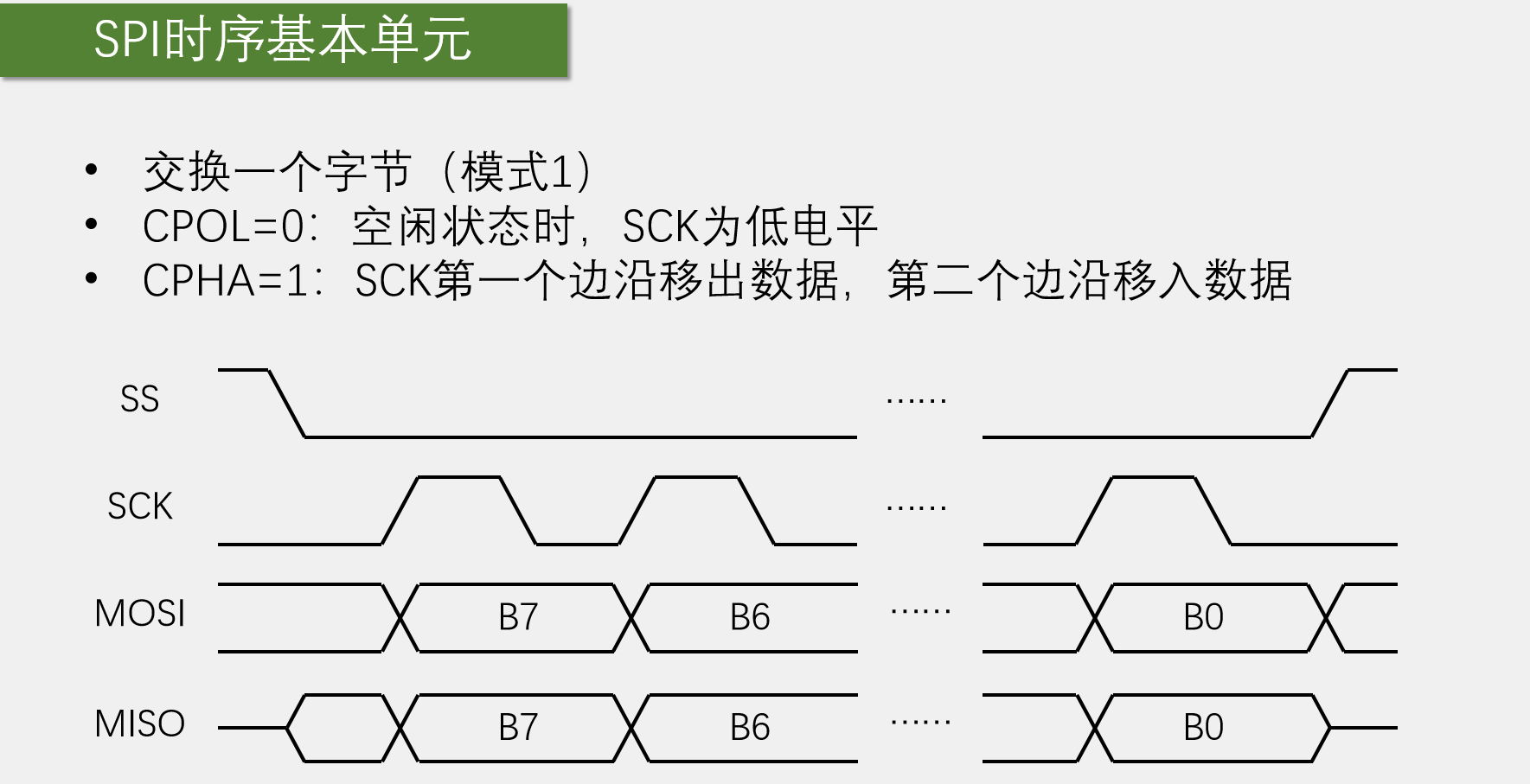
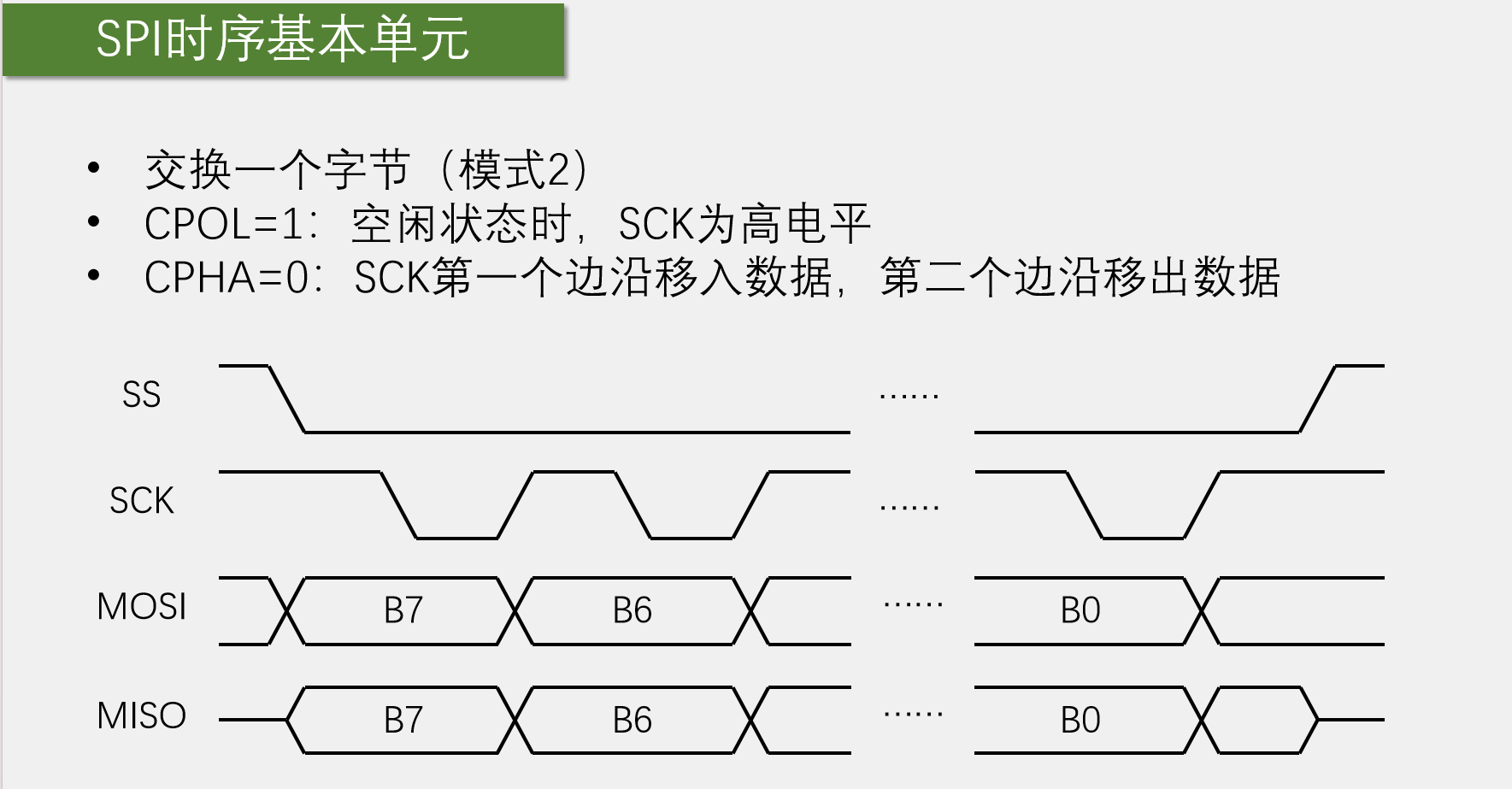
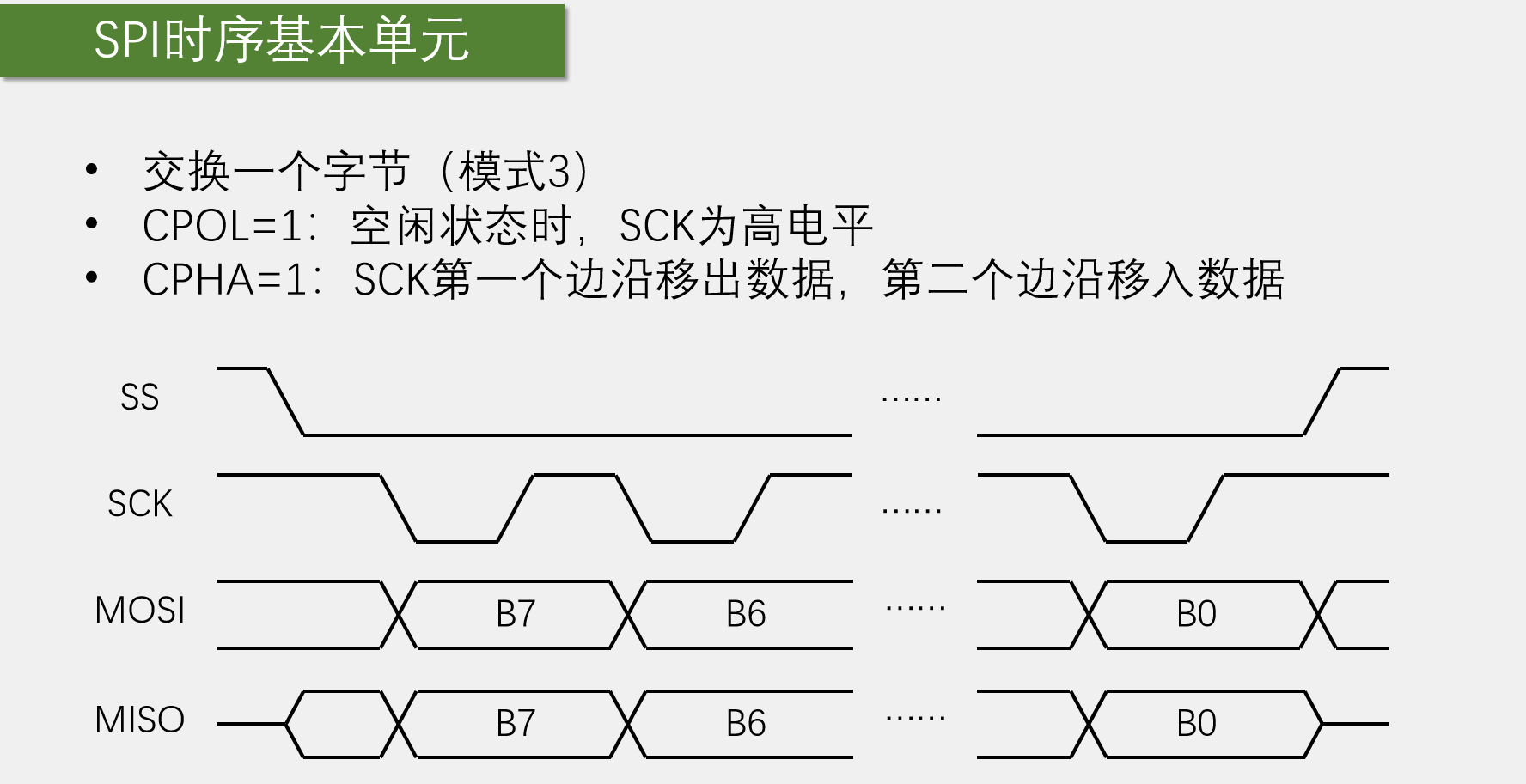
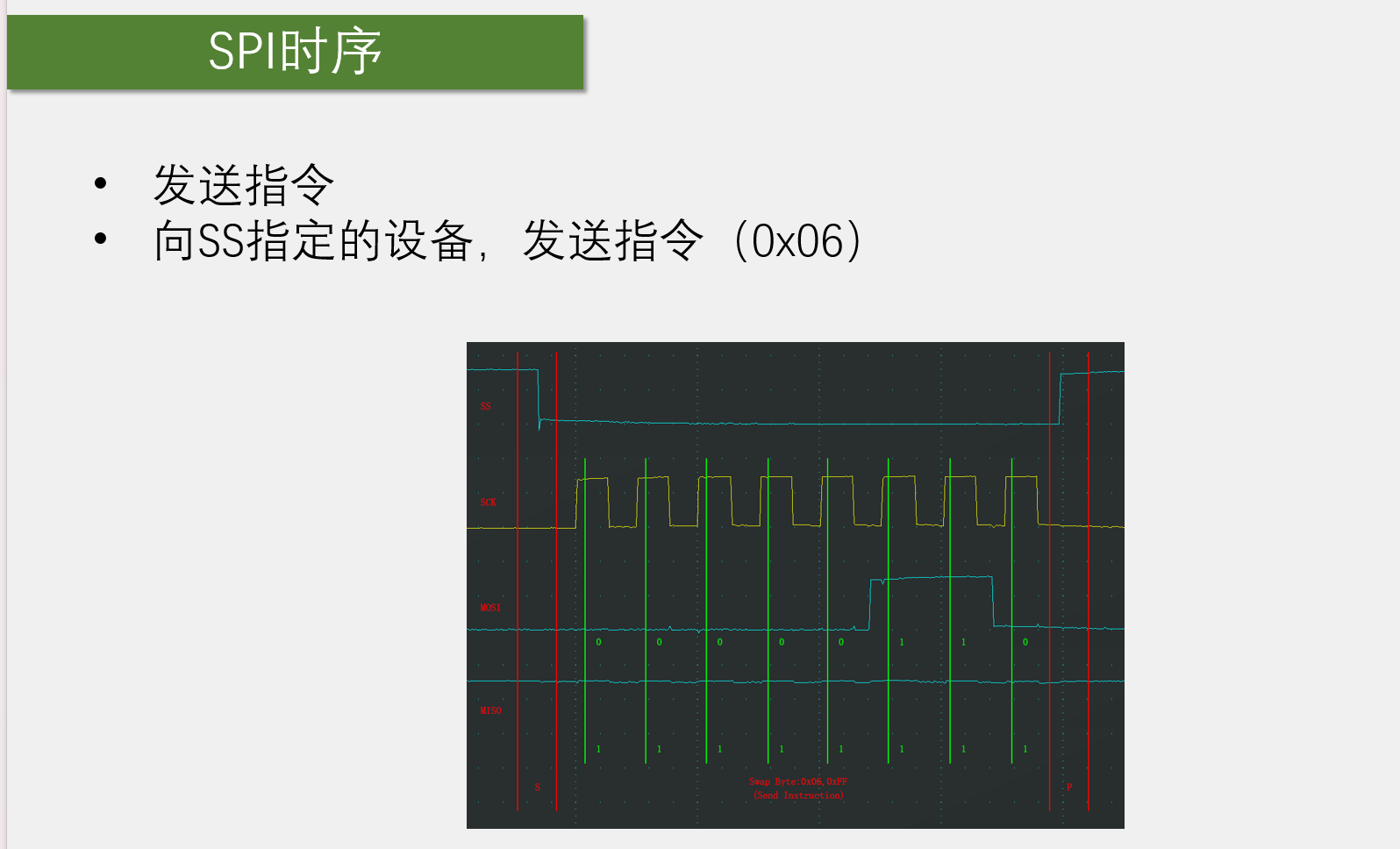
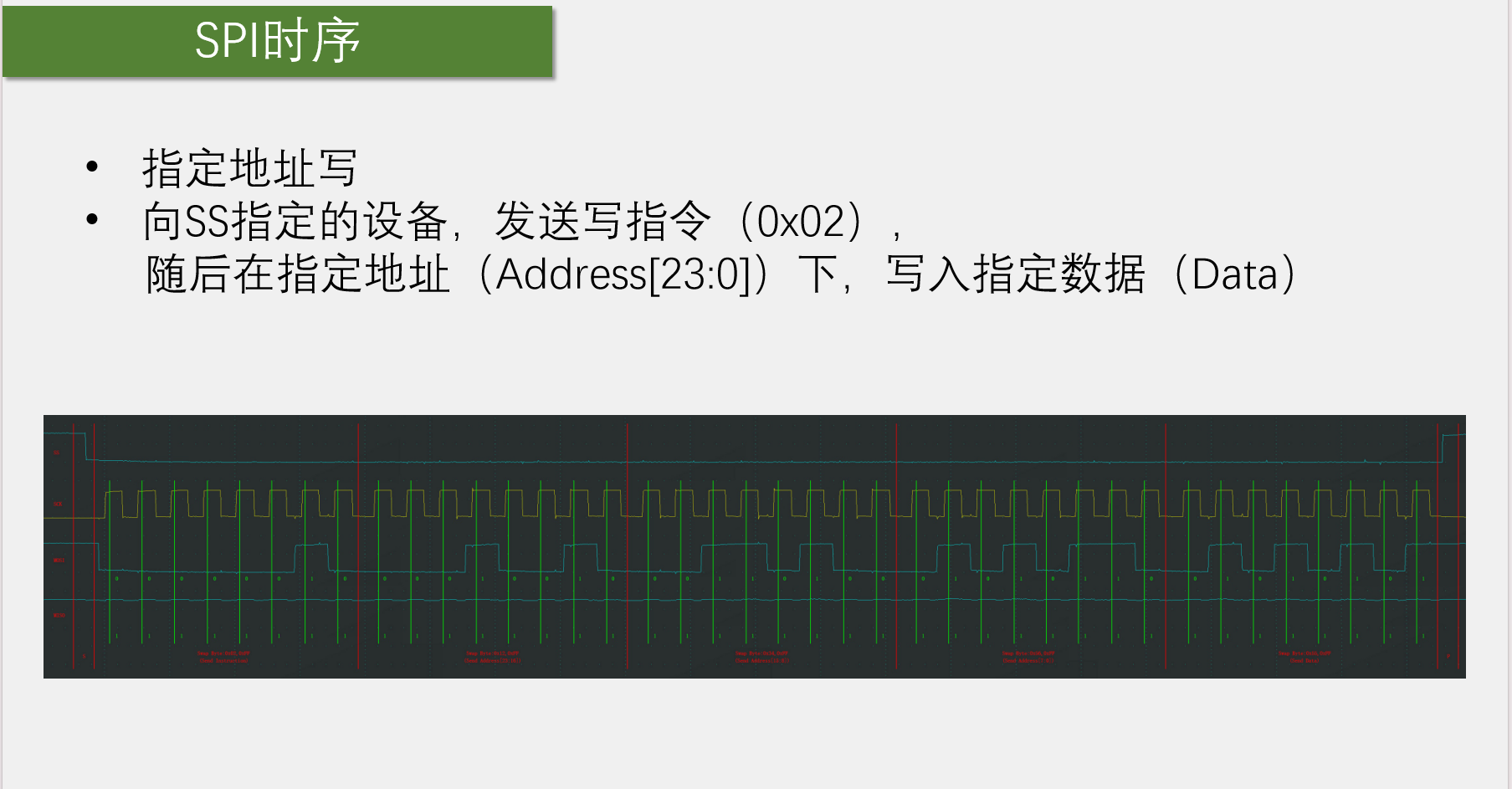
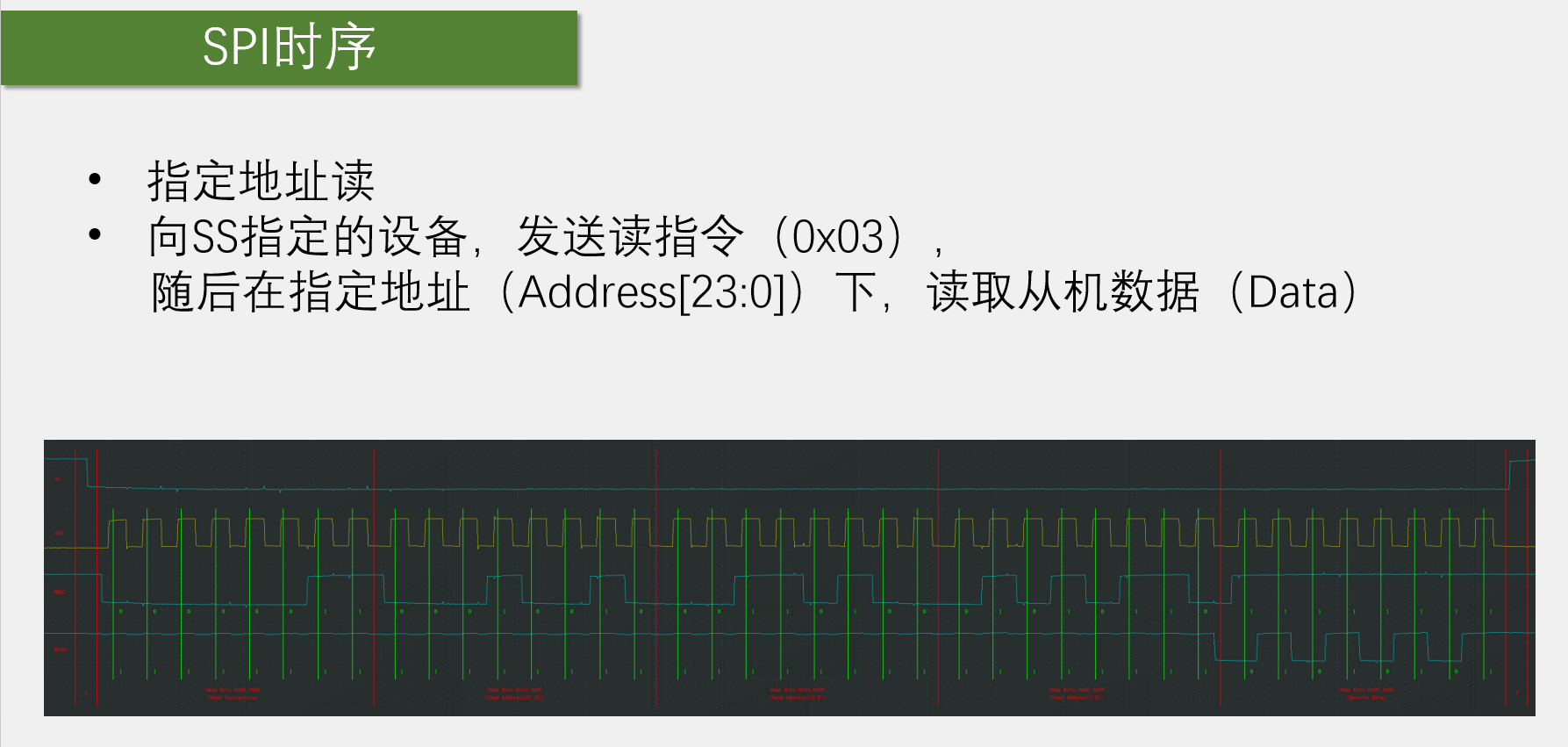
SPI通信
Master: 主机
Slave: 从机
SCK、CLK: 时钟
MOSI: 主机输出从机输入
MISO: 主机输入从机输出
DI: 数据输入
DO: 数据输出
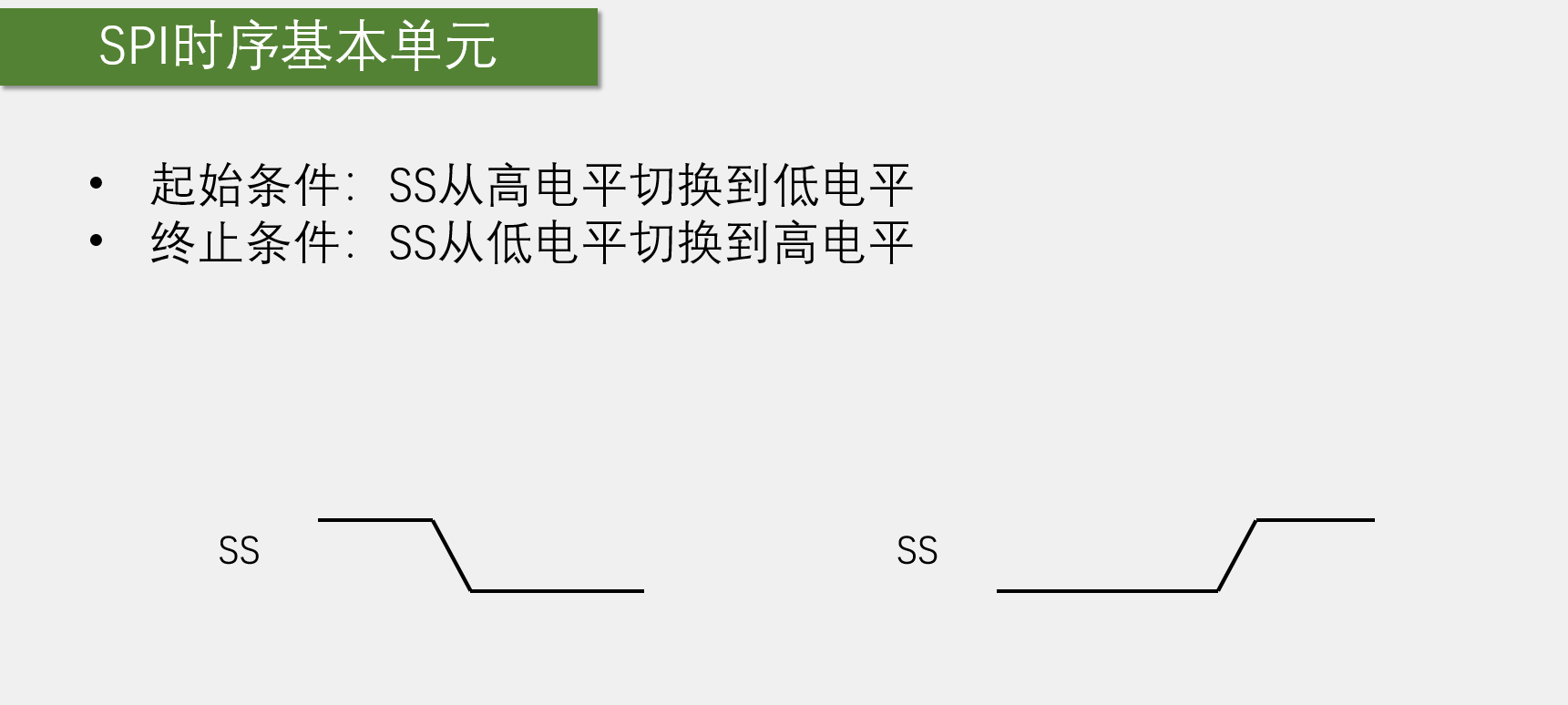
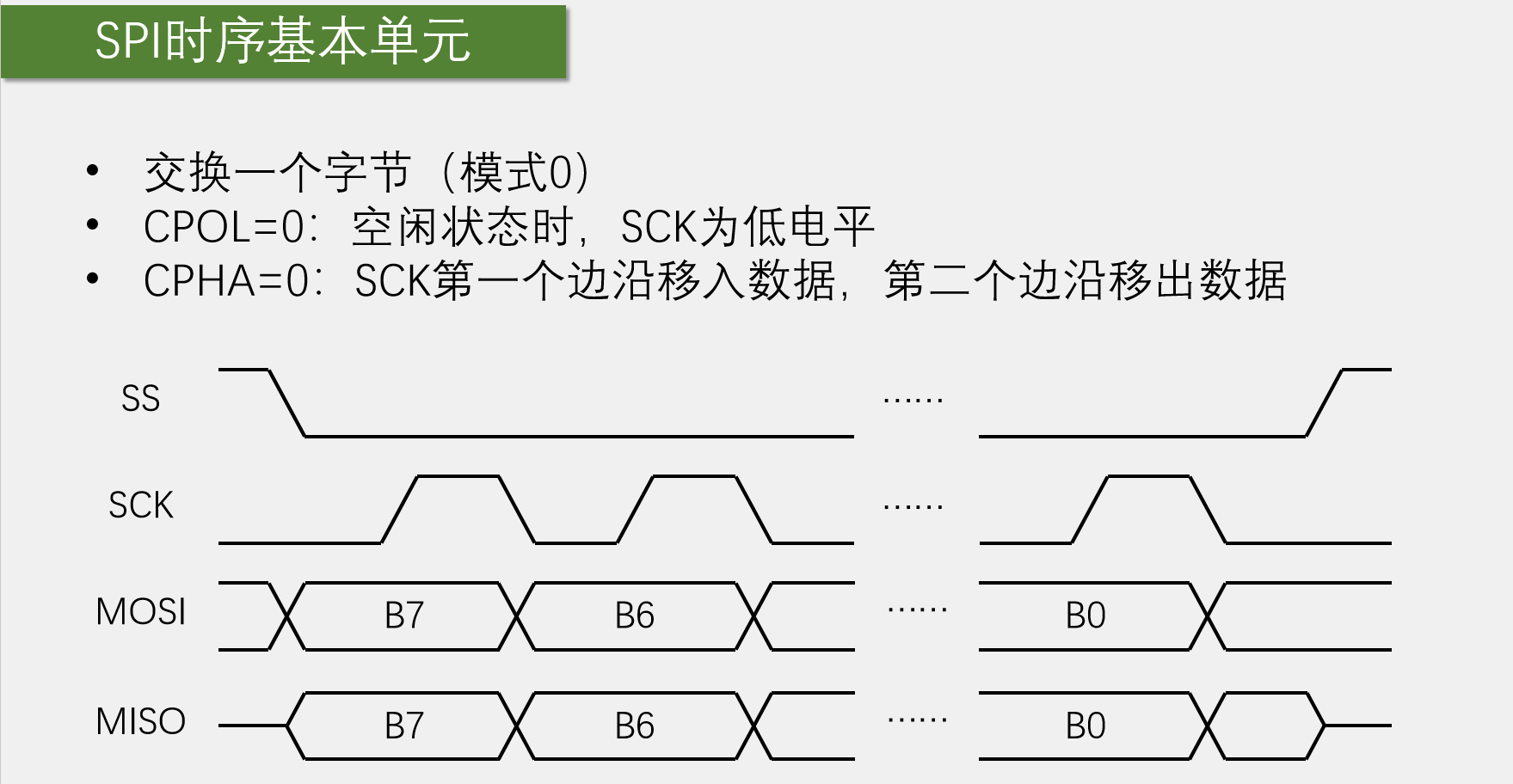
CS、SS: 从机选择

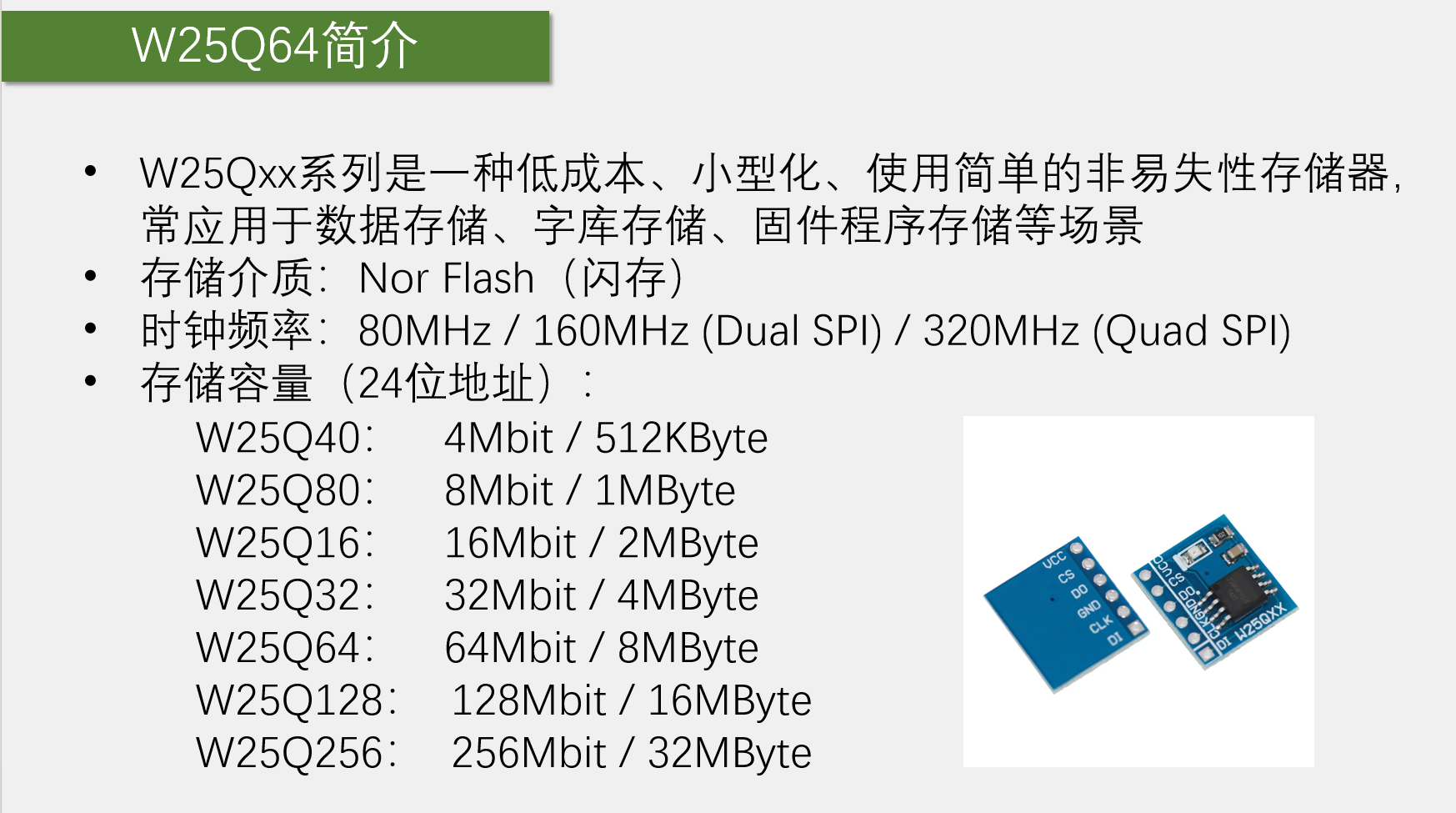
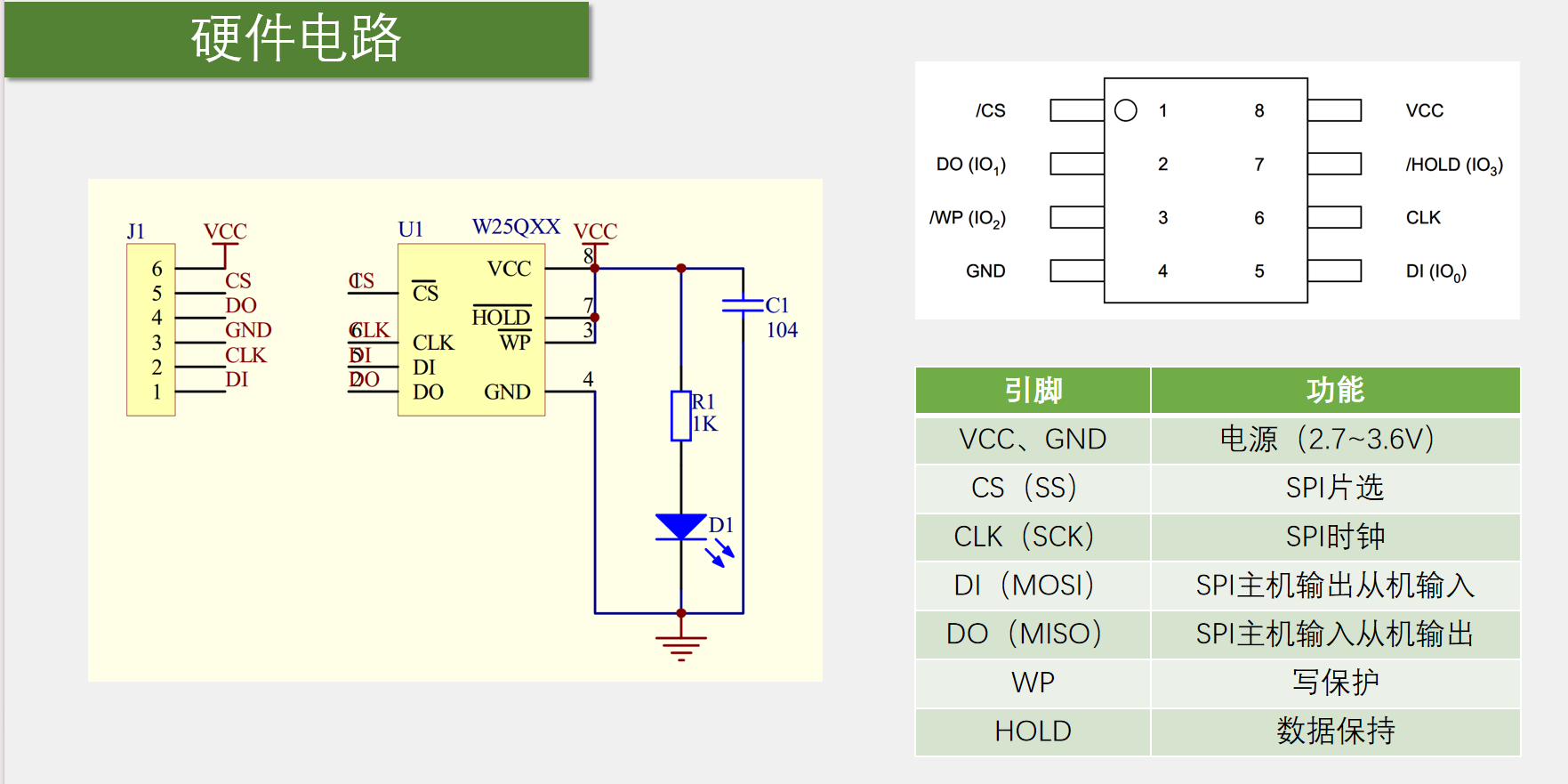
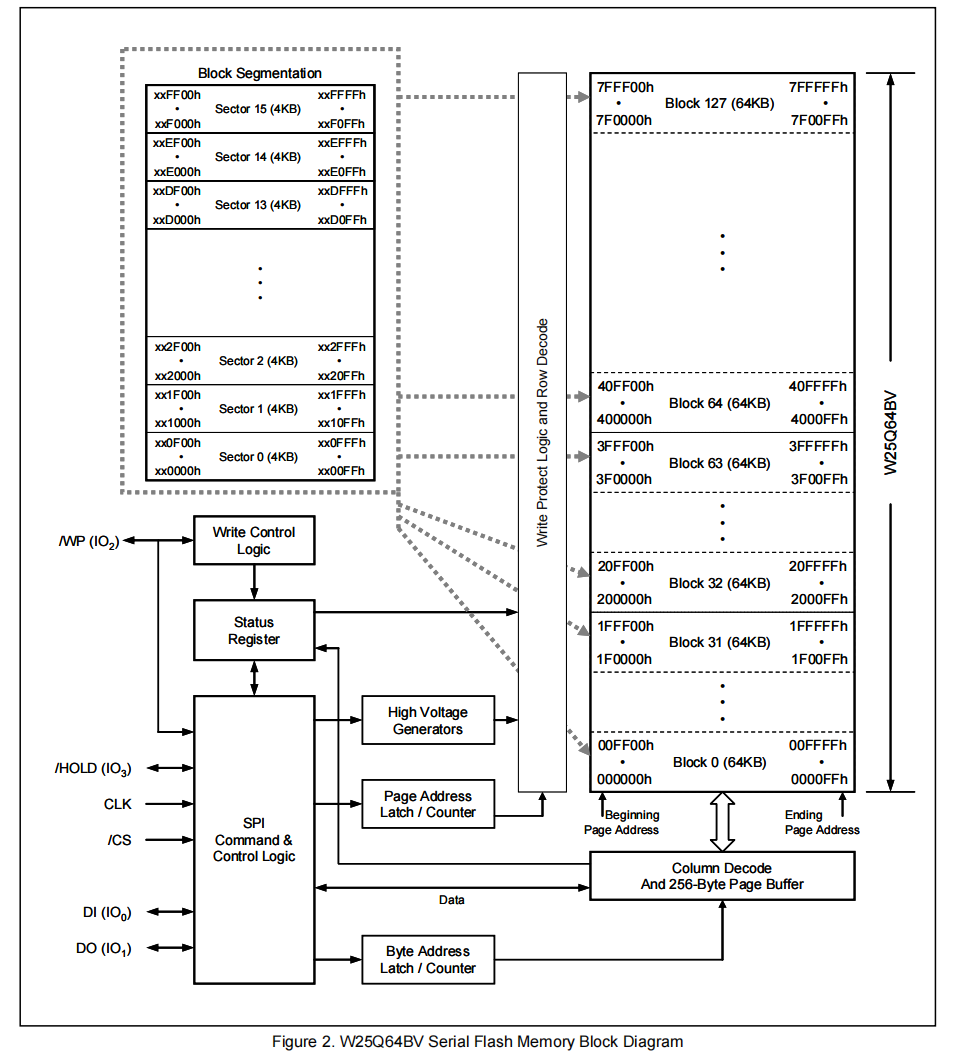
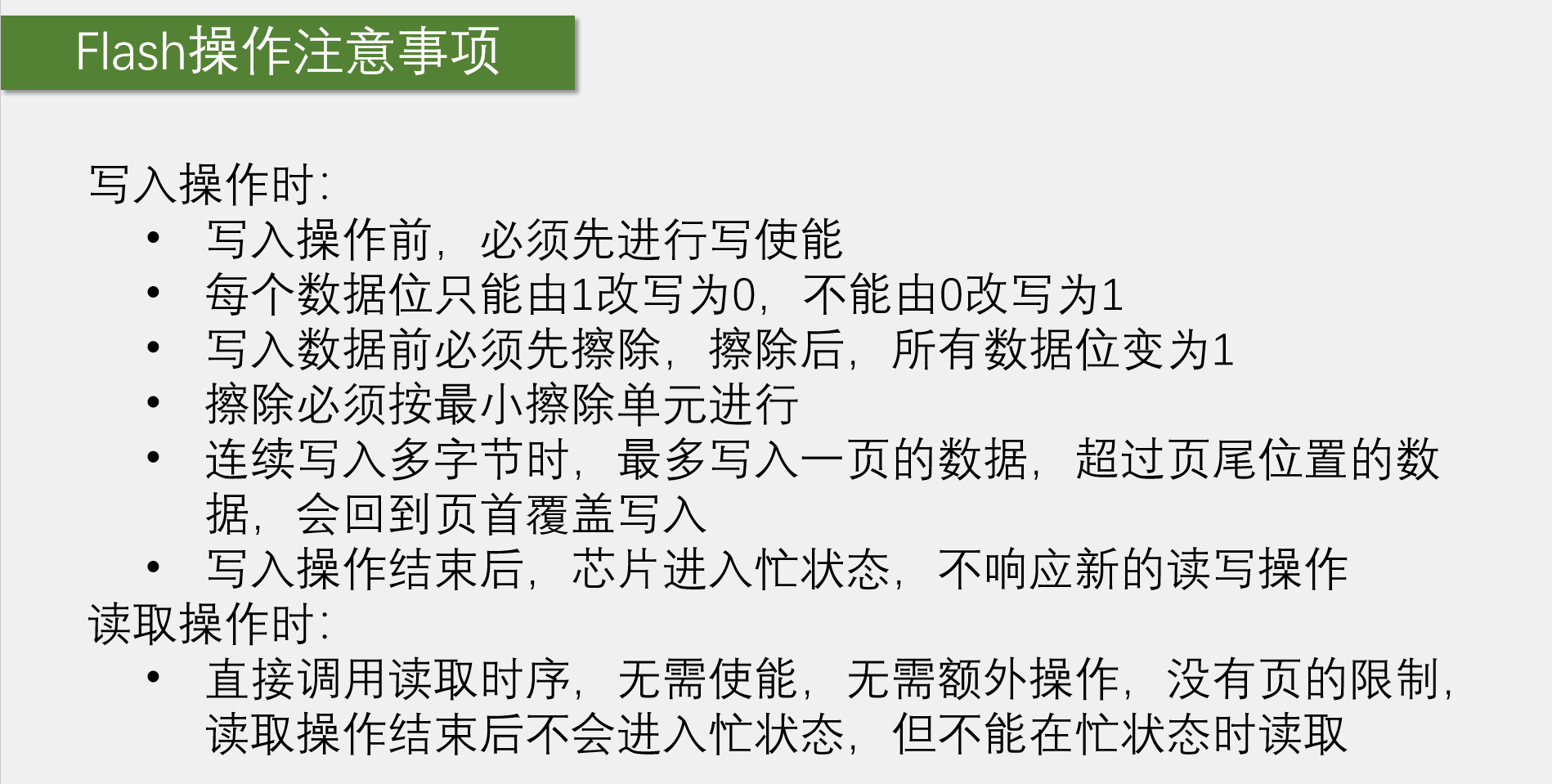
W25Q64存储
W25Q64框图:
转载请注明来源,欢迎对文章中的引用来源进行考证,欢迎指出任何有错误或不够清晰的表达。可以在下面评论区评论,也可以邮件至 jungle8884@163.com

